
Kobotiikka on robotiikan ala, jossa robotti toimii yhteistyössä ihmisen kanssa. Kobotin työtehtäviin kuuluu usein toimiminen ihmisen kanssa tai itsenäisesti tuotantolinjalla. Kobotin ohjelmointi on myös tehty helpoksi, joten sen siirtäminen ja toimintakuntoon saattaminen tapahtuu nopeasti. Tällöin laite voidaan siirtää sinne, missä kapasiteettia tarvitaan.
Työskentely kobotin läheisyydessä on turvallista, eikä se tarvitse suojakehikkoa tai muita turvalaitteita ympärilleen. Koboteissa on nivelten voima-anturit tai pinnan kosketusanturit, joiden avulla kobotti voi pysähtyä vaarallisissa kontakteissa. Yleisesti kobotit ovat helppoja ohjelmoida ja monelle laitteelle ohjelmointi tapahtuu käsin opettamalla: siirtämällä kobotin tarttuja kädestä pitäen haluttuihin pisteisiin. Useilla eri robottivalmistajalla on omat kobottimallinsa. Suomessa yleisimpiä ovat ABB:n YuMi, Universal Roboticsin URx, KUKA Roboticsin Iiwa, Omronin TMx ja Techmanin TM-tuoteperhe.
Lisäksi nykyisiin teollisuusrobotteihin on saatavana “pehmusteita”, joissa on kapasitiivinen anturi. Nämä pehmusteet toimivat kosketustunnistimina, jolloin robottia voidaan käyttää ilman suoja-aitoja kobotin tavoin. Tavallisen robotin ja turvaskannerin yhdistelmällä voidaan myös “kobotisoida” perinteinen teollisuusrobotti.
Kobotiikasta tehtiin vuonna 2020 viisi projektia: Muuntosähkö, Hioma, Silmusalaatti, Etteplan ja Enics.
Muuntosähkö
Projektissa piti suunnitella kobottisolu, joka hitsaa muuntajia ja sinifilttereitä valmiiksi tuotteeksi. Tämä työvaihe tehtiin aikaisemmin käsiin, ja nyt olisi tarkoitus robotin avulla suorittaa vastaava toimenpide. Tehtäväksi muodostui jigin ja oikeastaan koko robottisolun suunnittelu alusta loppuun. Työssä päätettiin käyttää kääntöpöytää. Projektissa oli mukana kaksi opiskelijaryhmää, toinen koneautomaation ja toinen sähköautomaation koulutusohjelmasta. Tavoitteena oli simuloida eri työvaiheet, laskea simuloinnin avulla hitsaukseen kuluva aika ja sitä kautta kannattavuus- ja investointilaskelmat.
Työ tehtiin syksyllä 2020. Projekti pysyi hyvin aikataulussa ja onnistui hyvin. Tuloksena saatiin asiakkaalle kobottisolun simulointivideot ja siihen liittyvät laskelmat.
Hioma
Projektissa oli tarkoitus automatisoida hiontakivien puristustyövaihe. Tätä varten varsinainen hiomakivi ja siihen liittyvät työkalut mallinnettiin CATIA-ohjelmistolla ja valmistettiin 3D-tulostamalla. Näillä osilla sitten hahmotettiin eri työvaiheet ja haettiin mahdollisuuksia automatisointiin. Parhaasta vaihtoehdosta tehtiin simulointimalli Visual Componentsin ohjelmistolla. Lopuksi oli tarkoitus tehdä testi vielä oikealla robotilla hiontakivien prässäyksestä, mutta siihen aika ei riittänyt.
Työ tehtiin syksyn 2020 aikana. Projekti pysyi hyvin aikataulussa ja onnistui hyvin. Tuloksena saatiin asiakkaalle kobottisolun 3D-mallinnus ja ehdotus automatisoinnista. Työ jatkuu vielä yrityksen kanssa jatkoprojekteina.
Silmusalaatti
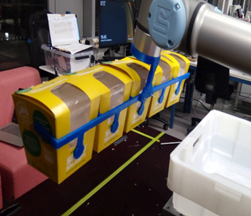
Projektissa piti käyttöön ottaa yrityksen aikaisemmin ostama kobotti. Tavoitteena oli suunnitella siihen uusi tarttuja ja suorittaa kannattavuuslaskelmia robotin käytöstä. Projektiin osallistui sekä sähköautomaation että liiketalouden opiskelijoita.
Yrityksen kobotti siirrettiin Metropolian Myyrmäen kampukselle ja siellä tehtiin suurin osa tuotantotesteistä. Opiskelijat suunnittelivat uudenlaisen tarttujan, joka koostui metalli- ja muoviosista. Nämä oli 3D-tulostettu kampuksella. Tarttuja pystyi ottamaan viisi rasiaa kerralla, ja tämä riitti yrityksen tuotantonopeuteen. Kobottisolu tuli tuotantolinjan loppupäähän, jossa rasiat pakataan isompaan laatikkoon.
Työ tehtiin syksyn 2020 aikana. Projekti pysyi hyvin aikataulussa ja onnistui erittäin hyvin. Tuloksena saatiin asiakkaalle toimiva tuotantolinjalle sopiva kobottisolu.
Etteplan
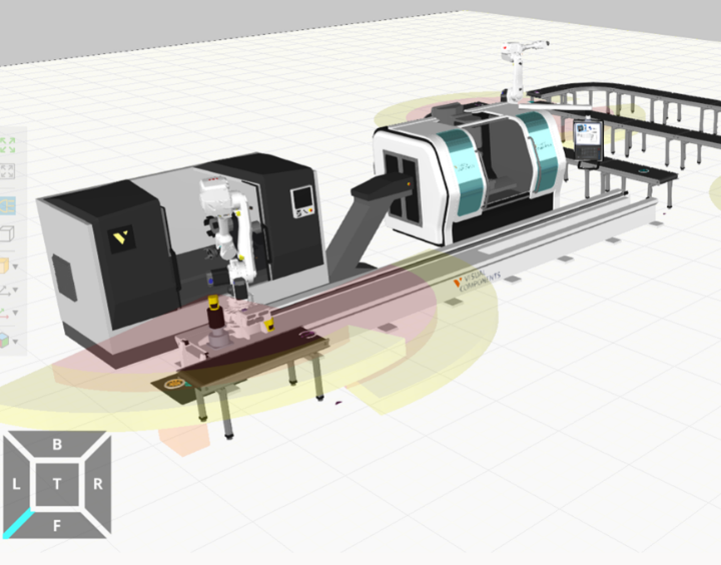
Projektissa oli tarkoitus tutkia eri vaihtoehtoja teollisuusrobotin turvallistamiseksi, ts. pyrittiin saamaan robotti reagoimaan ympäristöönsä, jolloin ei tarvita raskaita raja-aitoja robottisolun ympärille. Tähän käytettiin laserskanneria, joka havainnoi ympäristöään, ja saadun tiedon perusteella robotti joko hidastaa vauhtia tai pysäyttää toiminnan. Sama tekniikka on jo käytössä vihivaunuissa. Projektissa oli käytössä SICKin laserskanneri ja yrityksen laite- ja ohjelmisto-osaamista. Toimintaa simuloitiin Visual Componentsin ohjelmistolla ja lopulliset robottiohjelmat tehtiin ABB:n Robotstudio-ohjelmalla.
Työ tehtiin kevään 2020 aikana. Projekti pysyi hyvin aikataulussa ja onnistui erittäin hyvin. Tuloksena saatiin asiakkaalle myytävä tuote.
Enics
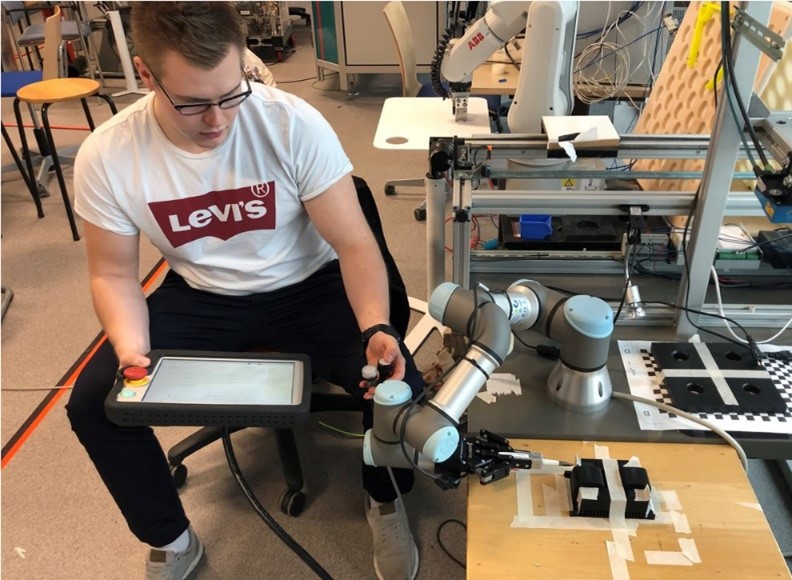
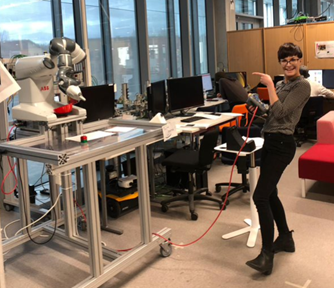
Projektissa tutkittiin kobotin käyttöä elektroniikkateollisuuden kokoonpanotehtäviin ja siinä nimenomaan piirilevyjen siirtelyyn makasiiniin ja makasiinista pois. Projektissa tehtiin sekä fyysisiä testejä oikeilla komponenteilla, piirilevyillä ja makasiineilla että simulaattoritestejä virtuaalimaailmassa. Simuloinnissa käytettiin ABB:n Robotstudio-ohjelmistoa ja fyysiset testit tehtiin Myyrmäen kampuksella, aluksi käyttäen Metropolian Yumi-robottia. Simulaattoritestissä paljastui ulottuvuusongelmia, joita vielä koetettiin ratkaista oikealla robotilla. Projektissa selvisi aika nopeasti, että oma osaaminen ei riittänyt tehtävän simuloimiseen. Onneksi saimme ABB:ltä arvokasta apua Robotstudion käyttämiseen.
Piirilevy oli sen verran painava, että se piti nostaa molemmilla käsivarsilla ja näin tehty synkronointiliike olikin hankala toteuttaa. Yumilla se kuitenkin saatiin onnistumaan. Simulaattorissa liike saatiin suoritettua helposti, mutta sitten kun tehtiin sama liike oikealla robotilla, paljastuikin, että kuorma oli kuitenkin liikaa varsinkin ulottuma-alueen äärirajoilla. Vaikka testi saatiin onnistumaan, tultiin siihen lopputulokseen, että Yumin käyttäminen projektissa olisi aika vaikeata. Robotin moottoreiden kuormittaminen äärirajoille jatkuvassa kolmivuorotyössä kuluttaisi sen loppuun hyvinkin nopeasti.
Lopuksi
Vaikka yleisesti robottien/kobottien pelätään vievän ihmisiltä työpaikat, robotiikalla on todellista potentiaalia luoda työpaikkoja, parantaa tuottavuutta ja turvallisuutta. Robotiikka ottaa ihmisen paikan joissain tehtävissä, mutta samalla synnyttää uusia työpaikkoja itse robottiin liittyvissä tehtävissä.
Kirjoittaja:

Timo Tuominen
Lehtori
timo.tuominen@metropolia.fi
Metropolia Ammattikorkeakoulu







Kommentit
Ei kommentteja