
Kategoria: Henkilöstö
Big-Flashin toimintamalleilla TKIO haltuun, Osa 1
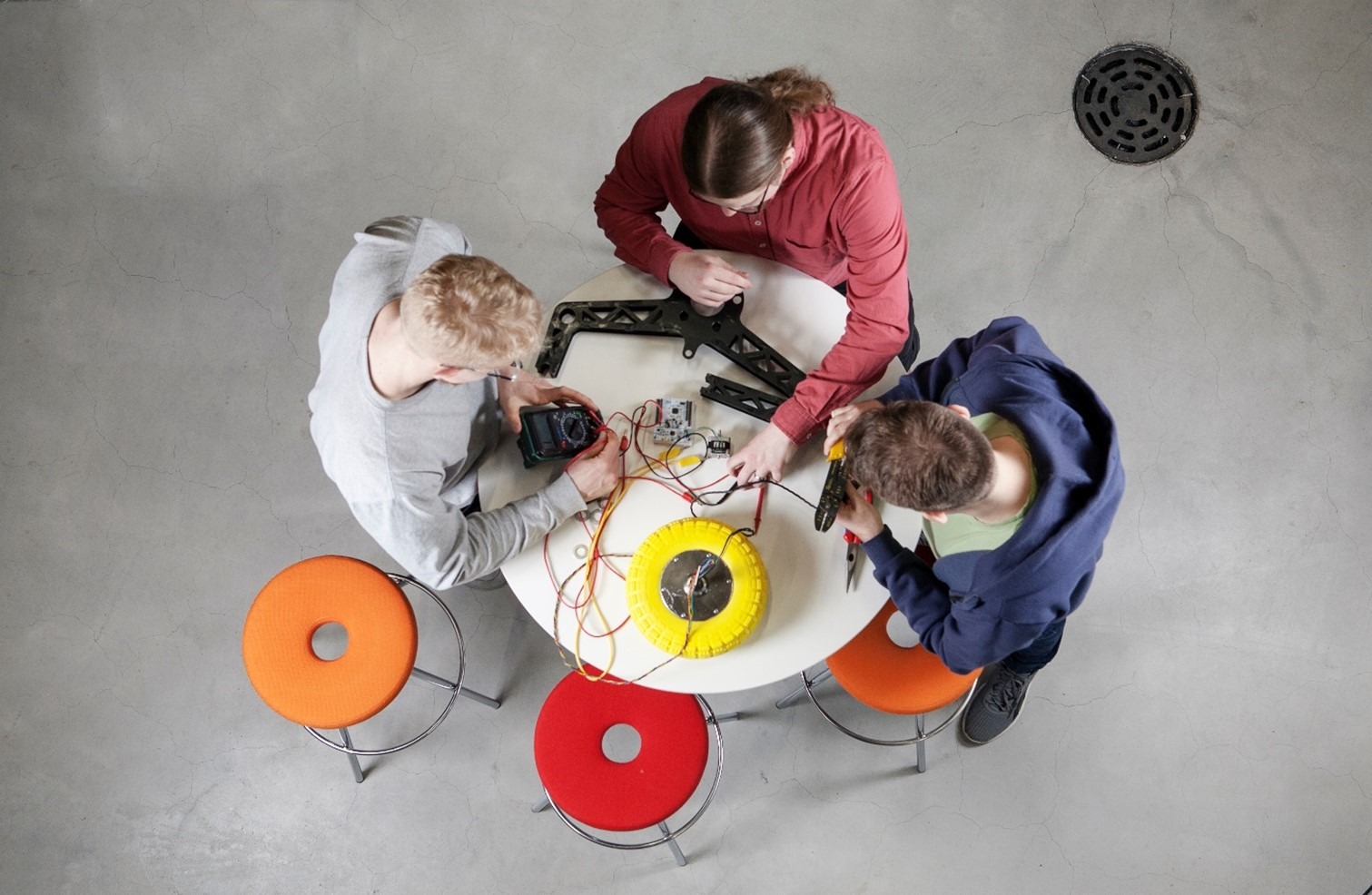
Oppilaita AutoJoen kimpussa Oinride-projektissa TKIO:lla tarkoitetaan tutkimus-, kehittämis- ja innovaatiotoiminnan (TKI) yhdistämistä oppimiseen ja opetukseen (O). Nopeasti muuttuva, kompleksinen toimintaympäristö vaatii TKI-toimintaan ja oppimiseen uusia toimintamalleja ja uudenlaista ajattelua. Käynnissä on ns. neljäs teollinen vallankumous, jossa fyysinen ja digitaalinen maailma yhdistyvät kyberfyysisiksi järjestelmiksi. Hanketoiminnan yleistyessä ja TKIO:n hakiessa rooliaan on minulla ollut kunnia olla mukana erilaisissa hankkeissa PalRobista ja Roboreelista Digi-Salamaan ja lopulta Big-Flashiin. Yhteistä näissä on ollut, että niissä on yhdessä yritysten ja oppilaiden kanssa haettu mallia, miten robotiikkaa ja muuta uutta teknologiaa voitaisiin parhaalla mahdollisella tavalla testata sekä soveltaa haettaessa kilpailukykyä ja vihreää siirtymää. Selkeästi on havaittu, että tällaiselle TKIO-tekemiselle tarvitaan metodiikka eli tavat toimia ja toteuttaa erikokoisia projekteja yritysten kanssa. Lisäksi on luotava fasiliteetit laajamittaisille projekteille. Aikaisemmin projekteja on toteutettu opetuslaboratorioissa, mikä on tuottanut selviä haasteita. Näihin on vastattu perustamalla projekteille tarkoitetut Garage-tilat. Roboreelissä huomattiin, ettei TKIO-toiminnassa riitä, että oppilasryhmä laitetaan hommiin omin päin. Tarvitaan kunnon toimintatapoja ja suunnitelmallista tekemistä. Digi-Salama-hanketta varten kehitettiin Salama-projektimalli, joka osoittautui erittäin toimivaksi. Hankkeessa tehtiin Uudenmaan alueella 25 Salama-projektia. Yritysten kanssa pidetyissä työpajoissa tunnistettiin, mikä on ollut toimivaa ja mitä pitää kehittää. Lisäksi todettiin, että tarvitaan jotain ennen ja jälkeen Salama-projektien. TKIO Big-Flashin tapaan Aikaisempia kokemuksia ja palautetta hyödynnettiin, kun Big-Flash-hankkeessa toteutettiin järjestelmällinen lähestymistapa yritysten kehityskohteiden löytämiseksi ja luotiin uudet projektielementit Suvituuli ja Iso myrsky. Aikaisempaa Salama-projektikonseptia kehitettiin ja se tuotteistettiin osaksi Robo ja AIoT Garage - kohtaamojen palveluita. Hankkeen tajunnan räjäyttävä osuus oli tavoite toteuttaa 122 projektia, 100 Suvituulta, 20 Salamaa ja 2 Isoa myrskyä. Liiketoiminnan digitaalinen kehittäminen sisältää kaksi osuutta, A + B. Osuus A on tarvekartoitus, jonka avulla löydetään eri yritysten kehityskohteet. Tämä pohjautuu SPIN-menetelmään (Situation, Problem, Implication, and Need-Payoff). Osuus B on teknologiatyöpaja, jossa valitaan tekninen ratkaisu valitun kehityskohteen toteuttamiseksi sekä tehdään minidemo. Tässä sovelletaan teknologiasprint- menetelmää. Suvituuli on nopea teknologiakokeilu, jonka kesto on 1–3 kuukautta. Lopputulos on simulaatio ja laboratoriossa toteutettu demo, POC (Proof of Concept). Tämän toteutuksesta vastaa 1–3 projektiryhmää palkatun projektiassistentin johdolla Metropolian ja muiden asiantuntijoiden tukemana. Salama-projektissa rakennetaan Suvituuli-projektin demo prototyyppiasteelle. Projektin tekemisestä vastaa Metropolian asiantuntija yhdessä hankkeen projektiassistentin kanssa. Ensimmäisessä vaiheessa projektista tehdään esiselvitys, jonka perusteella kirjoitetaan vaatimusmäärittely ja suunnitellaan toteutus. Toisessa vaiheessa rakennetaan laajamittainen prototyyppi, jonka perustella voidaan laskea, kannattaako projekti toteuttaa investointiprojektina. Prototyyppi testataan tuotanto-olosuhteissa yrityksessä tai niitä vastaavissa Garage-pajoissa. Iso myrsky on laajamittainen toteutusprojekti. Iso myrsky -projektien tekemisestä vastaavat Metropolian asiantuntijat yhdessä projektiassistenttien ja yrityksen edustajien sekä teknologiatoimittajien kanssa. Projektiryhmää vahvistetaan eri korkeakoulujen oppilailla. Iso myrsky -projektien toteutusta avustavia oppilasryhmiä rekrytoidaan Laureasta, Haaga-Heliasta ja Aallosta sekä Variasta. Lisäksi tukiverkostona toimivat Robotiikkayhdistyksen, Automaatioseuran ja Suomen tekoälykeskuksen asiantuntijat. Garaget ovat pajoja, joissa yritykset voivat nostaa kilpailukykyään ja vastata globaaleihin haasteisiin robotiikan, tekoälyn ja uusien teknologioiden avulla. Tavoitteenamme on olla edelläkävijä robotiikan ja uusien teknologioiden hyödyntämisessä. Metropoliassa kehitetään ja sovelletaan Industry 4.0 -teknologioita. Robotiikka (teollisuusrobotiikka, kobotiikka ja mobiilirobotiikka), digital twin -teknologia, tekoäly ja koneoppiminen sekä VR ja AR ovat uusia sovelluksia, joita hyödynnetään niin opetuksessa kuin erilaisissa hankkeissa. Tekemisen keskiössä ovat Myyrmäen kampuksen Robo ja AIoT Garaget. Ne tarjoavat fyysisen lokaation, resursseja sekä laitteistoja nopeille ja pidemmille kokeiluille sekä laajamittaisille toteutusprojekteille. Toiminnan kiihdyttämiseksi alueelle tulee testikäyttöön myös 5G-verkko. Myyrmäen kampuksen Robo Garage Mitä saatiin aikaan? Kaksi vuotta myöhemmin Big-Flash on saatu päätökseen. 84 yritystä, 106 tehtyä projektia ja 684 oppilasta myöhemmin voidaan todeta, että ilman kehitettyä Garage-konseptia ja projektimetodiikkaa ei tekemisestä olisi tullut mitään. Hankkeessa kehitetyt toimintamallit ovat antaneet selkeän selkärangan tekemiselle ja jatkavat eloaan osana Garage-palveluita. Onpa oppien pohjalta jo syntynyt kaksi jatkohankeajatustakin, joissa metodiikkaa viedään pidemmälle tavoitteena kokonaisvaltainen teknologinen tiekartta. Hieman esimakua hankkeen lopputuloksista nähdään hankkeen päätösseminaarin videossa. Mitä kaikkea kahdessa vuodessa saatiinkaan aikaiseksi, sattui ja tapahtui, siitä enemmän blogissa Big-Flashin toimimalleilla TKIO haltuun / Osa 2. Hienoa osaamista ja yhteistyötä Robo Garagen ja Urbanfarmlabin ammattilaisten kanssa ja projektiin omistautuneiden opiskelijoiden kanssa. Kaiken kaikkiaan ylivoimaisesti tuloksiltaan korkeatasoisin projekti, vaikka opiskelijat vielä matkalla oppivatkin paljon asioita. Valmistettu Demo toimi! Jarmo Lehtonen Metagrow Oy Kirjoittaja Antti Liljaniemi / Kone- ja autotekniikka / Robo Garage -vastaava +358 400 240 756 antti.liljaniemi@metropolia.fi Metropolia Ammattikorkeakoulu Lisää aiheesta Autotalleissa syntyy innovaatioita – Robo Garage avattiin Myyrmäen kampuksella. 2021. Verkkoaineisto. Metropolia Ammattikorkeakoulu. https://www.metropolia.fi/fi/metropoliasta/ajankohtaista/uutiset/autotalleissa-syntyy-innovaatioita-robo-garage-avattiin-myyrmaen-kampuksella. Luettu 5.9.2023. Big Flash – Kestävästi kohti kilpailukykyä. 2023. Verkkoaineisto. Metropolia Ammattikorkeakoulu, Big-Flash. https://bigflash.metropolia.fi/. Luettu 5.9.2023. Garage – Robotiikka- ja tekoälypajat. 2023. Verkkoaineisto. Metropolia Ammattikorkeakoulu. https://www.metropolia.fi/fi/tutkimus-kehitys-ja-innovaatiot/yhteistyoalustat/garage. Luettu 5.9.2023. Liljaniemi, A., & Paavilainen, H. 2020. Using digital twin technology in engineering education–course concept to explore benefits and barriers. Open Engineering, 10(1), s. 377–385. Liljaniemi, A.; Paavilainen, H. & Tuominen, T. 2023. Digi-flash pedagogy confronts new emerging technologies-Maturity level evaluation case study. Cogent Engineering, 10(1), 2186201. Teknologiat. 2021. Verkkoaineisto. Metropolia Ammattikorkeakoulu, Digi-Salama. https://digisalama.metropolia.fi/teknologiat/. Luettu 5.9.2023. Unkari-Virtanen, L., & Huhtaniemi, M. 2023. TKIO – tulevaisuuskestävää innovointia ja osaamista. Verkkoaineisto. Metropolia Ammattikorkeakoulu. https://www.theseus.fi/bitstream/handle/10024/802360/2023%20Taito%20110%20TKIO%20Tulevaisuuskest%c3%a4v%c3%a4%c3%a4%20innovointia%20ja%20osaamista%20Unkari-Virtanen%20Huhtaniemi%20.pdf?sequence=5&isAllowed=y. Luettu 5.9.2023.
Garage buustaa harrastustoimintaa

Harrastustoimintaa, mobiilirobotin kokoamista Robo Garagessa Yhteistyöalustat AIoT ja Robo Garage ovat nimensä mukaisesti autotallityyppisiä työtiloja, jotka mahdollistavat yritysprojektien lisäksi opiskelijoiden omat projektit. Autotalliprojektit syntyvät, kun muutama ystävä yhdistää voimansa ja saa inspiraation uuden asian kehittämiseen. Tällöin hyvät työtilat ja yhteishenki ovat välttämättömiä. Garage Club -toiminta pyrkii tukemaan talliprojekteja, mutta vielä tärkeämpänä tavoitteena on opiskelijoiden harrastustoiminnan kehittäminen ja ystävyyssuhteiden rakentaminen hauskan tekemisen kautta. Harrastetoiminnan väheneminen on huolestuttava trendi, joka näyttää vaikuttavan yhä useampaan korkeakouluopiskelijaan. Harrastukset tarjoavat kuitenkin mahdollisuuden uusien taitojen oppimiseen sekä vahvistavat sosiaalisia suhteita ja verkostoja. Kun opiskelijat voivat yhdistää opintonsa merkitykselliseen vapaa-ajan tekemiseen, he saavat paremman otteen ja tasapainon opiskeluun. Se antaa mahdollisuuden monelle opiskelijalle myös kehittää taitoja, jotka tukevat opintoja, ja vieläpä saman katon alla. Päivittäiset valintamme ylläpitävät hyvinvointiamme, ja siihen Garage-alustat tarjoavat niin sosiaalisen ympäristön kuin järjestystä päivään. Garagelaisten kesken käydään yhdessä syömässä ja vietetään muutenkin aikaa. Aivotyö on kuitenkin pajalla pääroolissa. Päivän askeleet taas saadaan kokoon jopa välillä robotteja pakoon juosten. Garage tukee ja kannustaa eteenpäin Metropolian yhteistyöalustat Robo ja AIoT Garage tarjoavat opiskelijoille ainutlaatuisen mahdollisuuden yhdistää harrastustoiminta, opiskelu ja jopa työllistyminen. Näillä alustoilla opiskelijat voivat osallistua monenlaisiin harrastuksiin ja projekteihin, jotka tukevat heidän intohimon ja kiinnostuksen kohteitaan. Tilat on suunniteltu erityisesti opiskelijoiden projektityöskentelyn sekä harrastustoiminnan tueksi. Garageissa opiskelijat voivat saada tarvittaessa myös apua ja tukea. Robo-Garage keskittyy robotiikkaan, joka on kiehtova aihe nykyisessä yhteiskunnassamme. Toiminnalla yritämme tukea uuden teknologian oppimista niin projektien kuin harrastustoiminnan kautta. Samalla haluamme osoittaa kaikille kiinnostuneille, että teknologian ja robotiikan ymmärtämiseen tarvitaan vain kiinnostus ja rohkeus lähteä oppimaan, sillä Garagen väki on tässä tukena. Opiskelijoita myös kannustetaan osallistumaan myös robotiikkaan liittyviin kilpailuihin, sillä tavoitteellisuus ja kilpailuhenki edistävät ryhmähenkeä ja yhteistyön kehittymistä uusien innovaatioiden parissa. Opiskelijoiden kertomaa “Tutustuin Garagen toimintaan kolmantena vuonna. Olin pitkään suunnitellut mekaanisen näppäimistön rakentamista, ja kampuksen automaatiolaboratoriosta minut ohjattiin Robo Garageen.” “Garageiden toiminta on tehnyt opiskelustani säännöllisempää. Vaikka minulla ei olisi luentoja, tulen tekemään yhteisiä ja omia harrasteprojekteja Garageille.” Piko, konetekniikan opiskelija “Tutustuin Robo Garageen nähtyäni ruokalan pöydällä mainoslappusen, josta kiinnostuneena lähdin katsomaan, mistä oli kyse. Kiinnostuin koulun ohella tapahtuvasta kerhotyyppisestä toiminnasta ja lähdin AutoJoe-projektiin mukaan.” “Olen saanut Garageista opiskelun ohelle harrastuksen, jonka parissa pääsen opettelemaan robotin suunnittelua, käyttöä sekä rakentamista.” Touko, elektroniikan opiskelija “Harrastaminen on vienyt paljon vapaa-aikaa mutta herättänyt myös kiinnostuksen harrastamiseen ja antanut konkreettisen kohteen, jonka parissa työskennellä, antaen siihen sekä välineet, apua, tilat ja rahoituksen. Harrastustoiminta on ollut myös täydellisenä vastapainona teoriapainotteiselle opiskelulle ja antanut mahdollisuuden soveltaa opittua.” Samuli, elektroniikan opiskelija Yritys Oinride Oy ja Metropolian opiskelijat kokeilemassa AutoJoe-mobiilirobottia kaivosympäristössä (Oinride-yrityksen robotti) Kirjoittaja: Daniel Korhonen Konetekniikan insinööriopiskelija, pääaineena automaatio Robo Garagen pajamestari ja harrastaja Daniel.korhonen@metropolia.fi Metropolia Ammattikorkeakoulu
Robo Garage – yritysten ja opiskelijoiden kohtaamispaikka

Robo Garage -työpaja luotiin ja varusteltiin keväällä 2021 Metropolia Ammattikorkeakoulun TKI-toiminnan yhteistyöalustaksi hanketoimintaa ja siihen sisältyviä yritysprojekteja varten. Tarkoituksena oli luoda tila, jossa oppilaitoksen, opiskelijoiden ja yritysten välistä toimintaa voitaisiin syventää käytännön toiminnan kautta. Näin voitiin kaventaa opiskelumaailman ja työelämän sekä yritysten välistä kuilua ja kartoittaa samalla yritysten tarpeita reaalimaailman osaamisesta. Garagen tärkeä asema yhteistyö- ja projektitilana kirkastui entisestään projektien edetessä: tila toimi Big-Flash -hankkeen aikana opiskelijoille ja toimintaan osallistuneille yrityksille sekä fyysisenä että henkisenä kohtaamispaikkana, jossa saatettiin työstää ratkaisuja yhteisesti työskentelyyn kannustavassa ympäristössä. Projekteille omistettu, nykyaikaisesti ja laadukkaasti varusteltu tila toi lisää vakuuttavuutta ja yhteistyöhalukkuutta toimintaan niin yritysten kuin opiskelijoidenkin osalta. Projekteja toteutettiinkin yli 40 viimeisen kahden vuoden aikana. Asiallinen työpaja ja osaavan henkilökunnan tuki toivat esiin Garageen kerättyä osaamista ja tietotaitoa käytännössä. Säännöiltään vapaampi ja käytännöiltään muita kampuksen laboratoriotiloja joustavampi Robo Garage mahdollisti sujuvan pitkäaikaisemmankin projektityöskentelyn, kun opiskelijat ja yritykset saattoivat jättää keskeneräisen projektinsa tilaan tietäen voivansa jatkaa samasta pisteestä seuraavalla työskentelykerralla. Projektityöskentelytila Robo Garagessa Alusta alkaen yhteistyötilaa luodessa tärkeänä tavoitteena oli pidetty mahdollisuutta oppia kokeilemalla, tekemällä ja miksei epäonnistumallakin; ei haittaa, jos komponentti kärähtää tai suunniteltu ratkaisu ei toimikaan. Jokaisesta kokemuksesta ja kokeilusta on kuitenkin mahdollista ammentaa oppeja, joita opiskelija ei välttämättä opintojen aikana tulisi muuten saamaan. Tästä hyvänä esimerkkinä toimii 3D-tulostaminen ja sen Robo Garagelle mukanaan tuomat valmistustekniset mahdollisuudet: jo muutamassa tunnissa opiskelijat voivat tehdä suunnittelemastaan tuotteesta tai osasta konkreettisen fyysisen version, jonka toimintaa kokeilla ja kehittää. Korostamalla sitä, miten toimintaan osallistumiseen ei vaadita aiempaa osaamista, ja antamalla opiskelijoille käytännön mahdollisuuksia yrittämiseen ja epäonnistumiseen osallistumisen kynnystä on saatu madallettua. Se on näkynyt myös konkreettisesti osallistujien määrässä. Jo ensimmäisestä opiskeluvuodestaan lähtien useat opiskelijat ovat osallistuneet tilan toimintaan ja antaneet arvokkaan työpanoksensa useisiin Garagen projekteihin. Opiskelijoiden harrastetoimintana toteuttama 3D-tulostettu robottikäsi Helposti lähestyttävä tila on mahdollistanut myös muunlaista yhteistyötä: Garagella järjestettävä harrastetoiminta on tuonut eri alojen opiskelijoita yhteen niin mobiilirobottien kuin droonien ja ajosimulaattorinkin merkeissä. Tätä vapaaehtoista toimintaa tukemaan on saatu myös eri alojen yrityksiä, jotka osaltaan tuovat sekä osaamista että arvokkaita kontakteja niin harrastetoimintaan osallistuville opiskelijoille kuin itse Garagen ja oppilaitoksen henkilöstölle. Opiskelijoiden osalta Garagen harrastetoiminta on synnyttänyt myös ystävyyssuhteita ja häivyttänyt alakohtaisen osaamisen rajoja: monialaisen yhteistyön kautta tietotaitoa on saatu kartutettua ja jaettua laajemmalle yleisölle kuin suppeammilla projekteilla olisi pystytty tekemään. Kokonaisuudessaan Robo Garage on antanut oivan esimerkin siitä, miten käytännön työskentelyllä ja toimintaan soveltuvalla tilalla saadaan luotua ja ylläpidettyä suhteita niin oppilaitoksen, opiskelijoiden ja yritysten kuin eri alojen osaajienkin välillä. Yhteistyö ja sen mukanaan tuomat verkostot ja mahdollisuudet ovat varmasti arvokas resurssi, jota vaalia ja kehittää tulevaisuudessakin Garage-toiminnan eri muotojen kautta. Voisivatko vastaavat tilat toimia jatkossa siltana myös eri oppilaitosten välillä jakaen osaamista ja kannustaen monialaiseen yhteistyöhön ympäri maata tai jopa maailmaa? Kirjoittaja: Toivo Parkkonen Konetekniikan insinööri, pääaineena koneensuunnittelu Big-Flash-hankkeen projekti-insinööri
Kobotiikan simulointia ja testausta tosielämästä
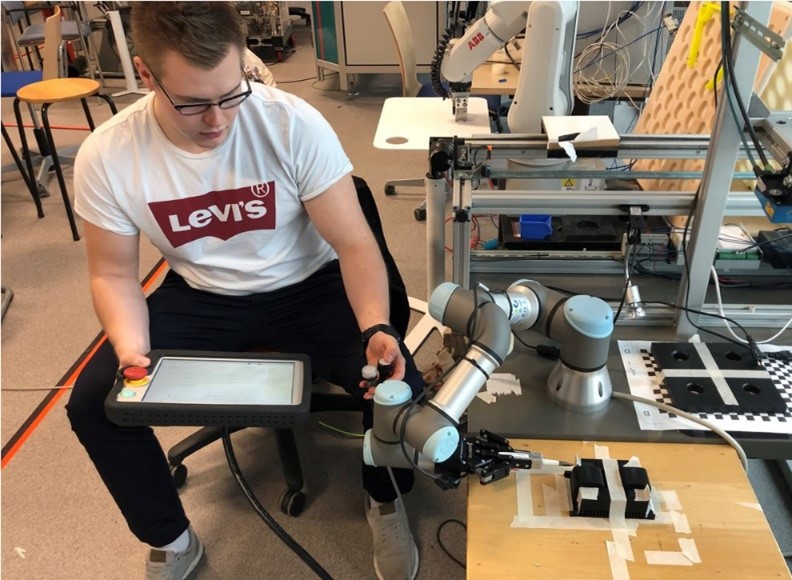
Kobotiikka on robotiikan ala, jossa robotti toimii yhteistyössä ihmisen kanssa. Kobotin työtehtäviin kuuluu usein toimiminen ihmisen kanssa tai itsenäisesti tuotantolinjalla. Kobotin ohjelmointi on myös tehty helpoksi, joten sen siirtäminen ja toimintakuntoon saattaminen tapahtuu nopeasti. Tällöin laite voidaan siirtää sinne, missä kapasiteettia tarvitaan. Työskentely kobotin läheisyydessä on turvallista, eikä se tarvitse suojakehikkoa tai muita turvalaitteita ympärilleen. Koboteissa on nivelten voima-anturit tai pinnan kosketusanturit, joiden avulla kobotti voi pysähtyä vaarallisissa kontakteissa. Yleisesti kobotit ovat helppoja ohjelmoida ja monelle laitteelle ohjelmointi tapahtuu käsin opettamalla: siirtämällä kobotin tarttuja kädestä pitäen haluttuihin pisteisiin. Useilla eri robottivalmistajalla on omat kobottimallinsa. Suomessa yleisimpiä ovat ABB:n YuMi, Universal Roboticsin URx, KUKA Roboticsin Iiwa, Omronin TMx ja Techmanin TM-tuoteperhe. Lisäksi nykyisiin teollisuusrobotteihin on saatavana “pehmusteita”, joissa on kapasitiivinen anturi. Nämä pehmusteet toimivat kosketustunnistimina, jolloin robottia voidaan käyttää ilman suoja-aitoja kobotin tavoin. Tavallisen robotin ja turvaskannerin yhdistelmällä voidaan myös “kobotisoida” perinteinen teollisuusrobotti. Kobotiikasta tehtiin vuonna 2020 viisi projektia: Muuntosähkö, Hioma, Silmusalaatti, Etteplan ja Enics. Muuntosähkö Projektissa piti suunnitella kobottisolu, joka hitsaa muuntajia ja sinifilttereitä valmiiksi tuotteeksi. Tämä työvaihe tehtiin aikaisemmin käsiin, ja nyt olisi tarkoitus robotin avulla suorittaa vastaava toimenpide. Tehtäväksi muodostui jigin ja oikeastaan koko robottisolun suunnittelu alusta loppuun. Työssä päätettiin käyttää kääntöpöytää. Projektissa oli mukana kaksi opiskelijaryhmää, toinen koneautomaation ja toinen sähköautomaation koulutusohjelmasta. Tavoitteena oli simuloida eri työvaiheet, laskea simuloinnin avulla hitsaukseen kuluva aika ja sitä kautta kannattavuus- ja investointilaskelmat. Työ tehtiin syksyllä 2020. Projekti pysyi hyvin aikataulussa ja onnistui hyvin. Tuloksena saatiin asiakkaalle kobottisolun simulointivideot ja siihen liittyvät laskelmat. Hioma Projektissa oli tarkoitus automatisoida hiontakivien puristustyövaihe. Tätä varten varsinainen hiomakivi ja siihen liittyvät työkalut mallinnettiin CATIA-ohjelmistolla ja valmistettiin 3D-tulostamalla. Näillä osilla sitten hahmotettiin eri työvaiheet ja haettiin mahdollisuuksia automatisointiin. Parhaasta vaihtoehdosta tehtiin simulointimalli Visual Componentsin ohjelmistolla. Lopuksi oli tarkoitus tehdä testi vielä oikealla robotilla hiontakivien prässäyksestä, mutta siihen aika ei riittänyt. Työ tehtiin syksyn 2020 aikana. Projekti pysyi hyvin aikataulussa ja onnistui hyvin. Tuloksena saatiin asiakkaalle kobottisolun 3D-mallinnus ja ehdotus automatisoinnista. Työ jatkuu vielä yrityksen kanssa jatkoprojekteina. Silmusalaatti Projektissa piti käyttöön ottaa yrityksen aikaisemmin ostama kobotti. Tavoitteena oli suunnitella siihen uusi tarttuja ja suorittaa kannattavuuslaskelmia robotin käytöstä. Projektiin osallistui sekä sähköautomaation että liiketalouden opiskelijoita. Yrityksen kobotti siirrettiin Metropolian Myyrmäen kampukselle ja siellä tehtiin suurin osa tuotantotesteistä. Opiskelijat suunnittelivat uudenlaisen tarttujan, joka koostui metalli- ja muoviosista. Nämä oli 3D-tulostettu kampuksella. Tarttuja pystyi ottamaan viisi rasiaa kerralla, ja tämä riitti yrityksen tuotantonopeuteen. Kobottisolu tuli tuotantolinjan loppupäähän, jossa rasiat pakataan isompaan laatikkoon. Työ tehtiin syksyn 2020 aikana. Projekti pysyi hyvin aikataulussa ja onnistui erittäin hyvin. Tuloksena saatiin asiakkaalle toimiva tuotantolinjalle sopiva kobottisolu. Etteplan Projektissa oli tarkoitus tutkia eri vaihtoehtoja teollisuusrobotin turvallistamiseksi, ts. pyrittiin saamaan robotti reagoimaan ympäristöönsä, jolloin ei tarvita raskaita raja-aitoja robottisolun ympärille. Tähän käytettiin laserskanneria, joka havainnoi ympäristöään, ja saadun tiedon perusteella robotti joko hidastaa vauhtia tai pysäyttää toiminnan. Sama tekniikka on jo käytössä vihivaunuissa. Projektissa oli käytössä SICKin laserskanneri ja yrityksen laite- ja ohjelmisto-osaamista. Toimintaa simuloitiin Visual Componentsin ohjelmistolla ja lopulliset robottiohjelmat tehtiin ABB:n Robotstudio-ohjelmalla. Työ tehtiin kevään 2020 aikana. Projekti pysyi hyvin aikataulussa ja onnistui erittäin hyvin. Tuloksena saatiin asiakkaalle myytävä tuote. Enics Projektissa tutkittiin kobotin käyttöä elektroniikkateollisuuden kokoonpanotehtäviin ja siinä nimenomaan piirilevyjen siirtelyyn makasiiniin ja makasiinista pois. Projektissa tehtiin sekä fyysisiä testejä oikeilla komponenteilla, piirilevyillä ja makasiineilla että simulaattoritestejä virtuaalimaailmassa. Simuloinnissa käytettiin ABB:n Robotstudio-ohjelmistoa ja fyysiset testit tehtiin Myyrmäen kampuksella, aluksi käyttäen Metropolian Yumi-robottia. Simulaattoritestissä paljastui ulottuvuusongelmia, joita vielä koetettiin ratkaista oikealla robotilla. Projektissa selvisi aika nopeasti, että oma osaaminen ei riittänyt tehtävän simuloimiseen. Onneksi saimme ABB:ltä arvokasta apua Robotstudion käyttämiseen. Piirilevy oli sen verran painava, että se piti nostaa molemmilla käsivarsilla ja näin tehty synkronointiliike olikin hankala toteuttaa. Yumilla se kuitenkin saatiin onnistumaan. Simulaattorissa liike saatiin suoritettua helposti, mutta sitten kun tehtiin sama liike oikealla robotilla, paljastuikin, että kuorma oli kuitenkin liikaa varsinkin ulottuma-alueen äärirajoilla. Vaikka testi saatiin onnistumaan, tultiin siihen lopputulokseen, että Yumin käyttäminen projektissa olisi aika vaikeata. Robotin moottoreiden kuormittaminen äärirajoille jatkuvassa kolmivuorotyössä kuluttaisi sen loppuun hyvinkin nopeasti. Lopuksi Vaikka yleisesti robottien/kobottien pelätään vievän ihmisiltä työpaikat, robotiikalla on todellista potentiaalia luoda työpaikkoja, parantaa tuottavuutta ja turvallisuutta. Robotiikka ottaa ihmisen paikan joissain tehtävissä, mutta samalla synnyttää uusia työpaikkoja itse robottiin liittyvissä tehtävissä. Kirjoittaja: Timo Tuominen Lehtori timo.tuominen@metropolia.fi Metropolia Ammattikorkeakoulu
MiR100 rullaa Digi-Salamassa

Tämä kirjoitus on jatkoa Mobiilirobotiikka liitää ja rullaa Digi-Salamassa blogille ja tässä käydään tarkemmin läpi Digi-Salama-hankkeessa toteutetut UGV-projektit (Unmanaged Ground Vehicle, ohjaamaton maa-ajoneuvo). UGV-tekniikalla tarkoitetaan maan päällä kulkevia laitteita, jotka kykenevät ohjausjärjestelmään liitetyillä sensoreilla tuottamaan tarpeeksi dataa autonomiseen päätöksen tekoon. Ensimmäisenä varsinaisena UGV-asiakasprojektina lähdettiin kehittämään miehittämättömän noutovaraston konseptia Refair Oy:lle. Yritys on kylmä-, ilmastointi- ja lämpöpumpputekniikan maahantuonti- ja tukkuliike. Sillä on monia asiakkaita, joilla saattaa olla tarve saada huoltokeikalle komponentti keskellä yötä. Automaattisella noutovarastolla pyrittiin vastaamaan tähän tarpeeseen. Tavoitteeksi muodostui kehittää miehittämätön noutovarasto, joka on turvallinen , asiakkaille helppokäyttöinen ja toteutettavissa. Tavoitteena oli myös skaalata ratkaisu yrityksen suurempiin varastoihin ja mahdollisesti kehittää konseptista tuote. Aluksi konetekniikan opiskelijaryhmän kanssa ideoimme neljä erilaista konseptia varaston toteuttamiseksi. Näistä yhtä lähdettiin jatkokehittämään; ajatuksena on, että mobiilirobotti MiR100 hakee varsinaisen varaston puolelta kokonaisen varastohyllyn, ajaa RFID-porteista läpi noutotilaan, asiakas kerää hyllystä tarvitsemansa tuotteet, robotti ajaa uudestaan porteista läpi ja RFDI-tunnisteella merkityt tuotteet on luettu molemmilla läpimenokerroilla. Erotuksesta järjestelmä päättelee, mitkä tuotteet asiakas on poiminut ja lähettää laskun. Projektiassistentilla lisää potkua tekemiseen Vuoden 2020 kevään ja kesän aikana palkattu projektiassistentti jatkoi työtä vielä pidemmälle ja rakensi asiakkaan tiloihin fyysisen demon koko kyberfyysisestä järjestelmästä. Lopputulemana voidaan todeta, että tavoitteisiin päästiin erinomaisesti ja demon pohjalta yritys pystyikin tekemään investointipäätöksen. Konseptin mukainen noutovarasto nousee yrityksen Pitäjänmäen toimipisteeseen toivottavasti vuoden 2022 aikana, kunhan järjestelmälle on löydetty luotettava toimittaja. Konseptin todettiin myös olevan siinä määrin toimiva, että siinä on potentiaali kehittyä aivan tuotteeksi asti sekä skaalata se Refairin muihin toimipisteisiin. Tässä projektissa oli todella hienoa nähdä iteratiivisen kehittämisen kulkevan kohti toteutettavissa olevaa ratkaisua ja saada lopulta nähdä yrityksen tekevän investointipäätöksen sen perusteella. Oli myös siinä mielessä hyvä, että heti ensimmäinen UGV-projekti hankkeessa oli näin onnistunut, sillä luohan se uskoa ja hyvää fiilistä myös jatkossa tekemiseen! Lisälaitteista lisäarvoa UGV-tekniikkaa käytettiin myös Loval Oyn tarpeista lähteneessä projektissa, jossa MiR100 näytteli jälleen pääosaa kuten Refairillakin. Loval Oy on lämmityskomponenttien valmistaja Loviisasta. Yritys on yksi Euroopan johtavista putkivastusten, lämmityselementtien ja -ratkaisujen valmistajista. Yrityksen tuotanto-varastotiloissa etäisyydet saattavat olla välillä hyvinkin suuria ja tuotantoliikenne massiivista. Tästä johtuen tuotannon yleisenä haasteena on työntekijöiden kulkemat pitkät matkat tuotantotiloissa. Mobiilirobotiikalla pyrittiin vapauttamaan ihmisiä mielekkäämpiin töihin. Projekti käynnistettiin keväällä 2020 konetekniikan projektiryhmän johdosta, ja yritys antoi opiskelijoiden vapaasti ideoida ratkaisuja, mutta antoi kuitenkin selviä reunaehtoja toteutukselle. Tavoitteeksi muodostui kehittää MiRHook-järjestelmää vastaava ratkaisu, jolla Loval pystyisi helposti ja edullisesti testaamaan järjestelmän soveltuvuutta tuotantoympäristöönsä. MiRHook on MiR-yrityksen tarjoama valmis lisälaiteratkaisu, jolla MiR100-robotti pystyy automaattisesti kiinnittymään rullakoihin tai muihin pyörillä kulkeviin alustoihin ja vetää niitä perässään. Projektiryhmä lähti aluksi itse suunnittelemaan myös automaattista kiinnittymistä rullakkoon, mutta toteutuksen haastavuudesta johtuen päädyttiin manuaaliseen ratkaisuun, jolla kuitenkin pystyttiin osoittamaan vetokoukkujärjestelmän käytön olevan mahdollista Lovalin tiloissa. Laajojen tuotantotilojen kesyttäminen Projektiryhmästä palkattiin kaksi opiskelijaa projektiassistenteiksi jatkamaan aloitettua työtä vielä pidemmälle. Kaksikolle muodostui omat tavoitteensa yhteisen projektiaiheen sisältä. Toinen jatkoi vetokoukkudemon rakentamista pidemmälle ja toinen suunnitteli kokonaan uuden ratkaisun tavaran liikuttamiseen autonomisesti MiR100-robotilla. Tässä ratkaisussa robotin päälle kiinnitettiin rullarata, jonka kallistuskulmaa robotti itse säätää karamoottorilla. Idea perustui painovoimaan siten, että robotin kuljettama paketti liukuu rullaradalta pöydälle, kun lineaarisen liikkeen tuottava karamoottori nostaa radan takareunan etureunaa ylemmäksi ja näin voidaan paketti jättää robotilla tuotantosolulle. Myös vetokoukun automaattinen kiinnittyminen saatiin jatkoprojektin aikana toteutettua samaisella karamoottorilla. Molempia ratkaisuja testattiin kahdella viikon mittaisella testijaksolla Lovalin tuotantotiloissa. Lopputuloksena asetettuihin tavoitteisiin päästiin oikein hyvin. Yritys sai arvokasta testidataa laitteen käytöstä oikeassa tuotantoympäristössä ja näki laitteen toiminnassa ilman myyntimiesten päätä pyörälle laittavia myyntipuheita. Oli hyvä nähdä MiR100:n toimivan erinomaisesti myös näin laajoissa, mutta kuitenkin ahtaissa tuotantotiloissa. Onnistuneesta demosta huolimatta asiakkaan kanssa jouduttiin yhteisesti toteamaan, että yksi robotti ei vielä riitä hanskaamaan näitä tiloja, vaan tarvitaan useamman robotin laivue. Jatkoprojektin aiheeksi muodostuikin vielä selvittää, kuinka monta robottia tarvitaan ottamaan Lovalin koko sisälogistiikka haltuun. Jatkoprojektia ei ole vielä tämän tekstin kirjoitushetkellä päästy aloittamaan. Virtuaalinen UGV Viimeisenä autonomisen robotiikan projektina esittelyssä on Mevealle toteutettu projekti. Mevea on simulaatioihin ja simulaattoreihin keskittyvä yritys ja he ovat kehittäneet ohjelmiston, jolla voidaan simuloida muun muassa ajoneuvojen käyttäytymistä eri tilanteissa ja saada hyvin tarkkaa dataa aivan komponenttitasolta asti. Tämän tyyppinen testaus on isona osana mahdollistanut autonomisten robottien kehityksen, sillä tällä tavoin saadaan dataa esimerkiksi pyörien luistamisesta eri alustoilla ja eri nopeuksilla, ennen kuin varsinaista robottia on edes rakennettu. Projektiin valikoitui ryhmä peliteknologian opiskelijoita ja projektin tavoitteeksi muodostui kehittää Unity-pelimoottoriin törmäyssimulaattori ajoneuvoille sekä työkalu komponenttien hallitsemiseen ja tarkasteluun. Projektin aihe osoittautui ennakoitua haastavammaksi eikä tätä myöten tavoitteisiin aivan päästy. Lopputuloksena syntyi kuitenkin työkalu, jossa on haluttuja ominaisuuksia, mutta ei tarpeeksi pitkälle kehitettynä. Jäi lopulta yrityksen itse päätettäväksi, kannattaako simulaattoria ja työkalua kehittää eteenpäin. Kohti plug & play -tasoa Edellä esitettyjen projektien tuloksista voidaan nähdä, että UGV-teknologia on käyttökelpoista ja tuo selvää lisäarvoa muun muassa sisälogistiikan automaattisiin ratkaisuihin. UGV-laitteiden käyttöönotto ja ohjelmointi vaikuttaa näiden projektien perusteella kohtuullisen yksinkertaiselta ja suoraviivaiselta. Kuitenkin täysi potentiaali laitteista päästään lunastamaan vasta, kun ne liitetään osaksi yrityksen toiminnanohjausjärjestelmää, on määritetty tarvittava laivue ja yksittäisille roboteille liitetään niiden tarvitsemat lisälaitteet. Voidaan siis sanoa, että UGV-teknologia on valmista teollisuuden tarpeisiin, mutta ei aivan vielä plug & play -tasolla. Kirjoittaja: Lauri Ristolainen Konetekniikan insinööri, pääaineena automaatio Digi-Salama-hankkeen projekti-insinööri, nykyinen projektiasiantuntija. Lauri.Ristolainen@metropolia.fi Metropolia Ammattikorkeakoulu
UAV-teknologia liitää

Tämä kirjoitus on jatkoa Mobiilirobotiikka liitää ja rullaa Digi-Salamassa blogille ja tässä käydään tarkemmin läpi Digi-Salama hankkeessa toteutetut UAV-projektit (Unmanaged Air Vehicle). Ensimmäisenä UAV-projektina lähdettiin toteuttamaan rakennustyömaan etävalvontaa droonien avulla Aiforsite Oy:n kanssa. Yrityksellä on toimiva systeemi työmaan ulkopuolelta kuvaamista varten, ja Digi-Salaman projektiaiheeksi valikoitui työmaan kuvaaminen rakennuksen sisältä. Ulkona lentävien droonien tuottamaa videosyötettä ja niiden keräämää dataa ympäristöstä käytetään hyväksi rakennuksen tietomallia (BIM) rakennettaessa. Droonien välittämästä videosyötteestä yritys pystyy algoritmien avulla laskemaan työmaan valmiusasteen ja jopa tarkastamaan, ovatko työkalut ja koneet tallessa. Tällä hetkellä sisätilat kuvataan kypäräkameralla. Monikerroksisen kerrostalon läpi käveleminen on aikaa vievää, eikä ehkä insinöörin mieluisintakaan hommaa. Autonomista sisälentämistä varten tutkittiin erilaisia droonimalleja ja päädyttiin valitsemaan DJI:n Mavic Pro. Laite valikoitui pienen kokonsa ja sille valmiiksi tarjolla olevan SDK:n (Software Development Kit) takia. Tavoitteena autonominen sisälentäminen Projektin tavoitteeksi muodostui lopulta välittää droonin videosyötettä reaaliajassa yrityksen palvelimille, toteuttaa etäohjausjärjestelmä ja tutkia autonomisen sisälentämisen mahdollisuuksia. Projektin edetessä kävi selväksi, että valitulla droonimallilla on suuria rajoitteita autonomisen lentämisen suhteen. Sen integroidut sensorit eivät yksinkertaisesti tarjonneet tarpeeksi dataa autonomista lentämistä varten, eikä SDK ole vielä täysin valmis. Sen johdosta laitteeseen oli tässä vaiheessa mahdotonta liittää sensoreita tuottamaan autonomisen lentämisen mahdollistava lisäinformaatio. Videosyötteen välittämisestä ja etälennätyksestä valmistui proof-of-consept tasoinen demo, jolla pystyttiin osoittamaan näiden toimintojen olevan mahdollisia toteuttaa ja niiden olevan hyödyllisiä yrityksen kannalta. Tämä projekti oli mielestäni hyvä esimerkki siitä, että aina ei tarvitse onnistua täydellisesti, jotta työstä olisi kuitenkin paljon hyötyä. Yrityksellä itsellään on paljon osaamista kyseisen teknologian saralla, mutta silti hekin olisivat lähteneet liikkeelle meidän kanssamme samasta nolla pisteestä projektia käynnistäessä. Saimme siis taklattua mahdottomia vaihtoehtoja pois ja hieman tasoitettua polkua kohti autonomista . Droonilennätyksestä sääpalveluiksi Toinen, hieman erilainen, lähestymistapa UAV-tekniikan hyödyntämiseen löytyi Ilmatieteen laitoksen (FMI) tarpeista ja velvollisuudesta tuottaa mahdollisimman hyviä eli tarkkoja sääpalveluita. Tällaisia palveluita omat muun muassa sääennusteet ja sään lentokelpoisuus tiedot. Visiona on, että kun jonain päivänä, ei niin kaukana tulevaisuudessa, droonit kuljettavat yötä päivää paketteja taivaalla, niin niiden pääasiallisen kuljetustyön ohella voitaisiin tuottaa hyvin tarkkaa dataa tuulesta, lämpötilasta sekä ilmankosteudesta ja -paineesta. Näin saataisiin kerättyä suuri määrä dataa, josta algoritmein laskemalla voidaan päätellä sääolosuhteet erittäin lokaalisti ja saada tarkkaa tietoa sään ominaisuuksista eri korkeuksissa. Dataa kerätään drooniin liitetyillä tuuli-, kosteus- ja ilmanpaineantureilla. Lisäksi tuulesta saadaan myös dataa droonin moottorien telemetriatiedoista. Telemetriatiedoista tuulen päättelyä voi olla hyvä avata esimerkillä: Kuvitellaan, että droonin tehtävä on leijua ilmassa paikallaan. Tuulettomissa olosuhteissa droonin kaikki moottorit tekevät työtä täsmälleen yhtä paljon ja ohjainyksikkö antaa jokaiselle moottorille saman ohjearvon. Ohjearvon ja oloarvon välillä ei ole tällöin eroa, kun drooni siis leijuu ilmassa paikallaan. Kun alkaa tuulla, droonin moottorit pyrkivät kompensoimaan tätä ulkopuolelta tulevaa vaikutusta. Tällöin ohjearvon ja oloarvon välille syntyy erotus, jonka ohjainyksikkö pyrkii kompensoimaan käskemällä oikeiden moottorien tehdä lisää työtä. Tästä moottorien tekemästä lisätyöstä voitaisiin lopulta algoritmien avulla päätellä tuulen suunta ja voimakkuus. Telemetriatiedoista oli kiinnostunut myös toinen projektiin osallistunut yritys Insta Group Oy. Insta Group Oy on suomalainen perheyritys, jonka toimialoja ovat teollisuusautomaatio, digitaalinen tietoturva ja puolustusteknologia. Heillä on itsellään vankkaa osaamista drooniteknologiasta ja yritys on tuottanut drooneja sekä droonipalveluita Puolustusvoimille. Instan mielenkiinto kohdistui ilmiöön, jossa kylmissä olosuhteissa propelleihin kertyy jäätä. Ilmiötä kutsutaan jäätämiseksi ja sillä on vaikutusta droonin lentokykyyn. Kuinka paljon vaikutusta on ja kuinka jäätäminen voidaan havaita, määrittyivät Instan puolesta projektin tavoitteiksi. Syksyn 2020 aikana projekti käynnistettiin konetekniikan ja IT-puolen opiskelijaryhmien kanssa. Tavoitteiksi määritettiin säädatan ja telemetriatietojen kerääminen ja niiden välittäminen Ilmatieteen laitoksen rajapintaan. Aluksi konetekniikan projektiryhmä valitsi komponentit itse kasattavaan droniin, kokoonpani ja varusti sen tarvittavilla antureilla. FMI:n kanssa tehtiin useita mittauslentoja kiinteiden sääasemien läheisyydessä sekä FMI:n omien droonien kanssa referenssidatan saamiseksi. Kun dataa oli saatu kerättyä ja todettu sen olevan tarpeeksi yhteneväistä referenssidatan kanssa, alkoi vasta sitten it-opiskelijoiden työ. Anturi- ja telemetriadatan eteenpäin välittäminen, tallentaminen sekä tätä tietoa käsittelevän algoritmin kehittäminen muodostuivat it-opiskelijoiden projektin tavoitteiksi. IT-ryhmän päästessä todella vauhtiin vasta kun konetekniikan ryhmä oli saanut droonin koottua ja dataa kerättyä, muodostui aikataulu ryhmälle liian tiukaksi aiheen haastavuuteen nähden. Ryhmän lopputulokseksi jäi, ettei toimivaa koneoppimismallia saatu aikaan, mutta dataa saatiin visualisoitua Excelin ja Scikit-learn-koneoppimisalustan avulla. Projektin aikana valitettavasti ei saatu käytännön tasolla selvitettyä jäätämistä lainkaan. Metropolialla on Myyrmäen kampuksella olosuhdehuone, jossa jäätämistä olisi voitu tutkia, mutta se oli vuokrattu samaan aikaan moneksi kuukaudeksi VTT:n käyttöön. Lopulta Instan asettamiin tavoitteisiin pystyttiin vastaamaan vain kirjallisuusselvityksen tasolla, jonka toteutti projektiryhmien työtä jatkamaan palkattu projektiassistentti. Projektiassistentiksi valikoitui opinnoissaan loppusuoralla oleva sähköautomaation opiskelija. Hänen osaamisensa vastasi erinomaisesti projektin tarpeita, sillä hänellä oli kokemusta sekä elektroniikasta että datan käsittelystä. Assistentin työn tavoitteena oli kerätä dataa ja kehittää tiedonsiirron malli, jolla data saataisiin siirrettyä Ilmatieteen laitoksen rajapintaan sekä tutkia jäätämistä. Tuloksena kehitettiin lähetyslaatikko, joka toteutti tiedonkeruun ja -siirron onnistuneesti sekä edellä mainittu kirjallisuusselvitys jäätämisen vaikutuksesta droonin lentämiseen. Tämä Projekti on eittämättä yksi mielenkiintoisimmista, joissa olen ollut lyhyen urani aikana mukana. Pelkästään droonin kasaaminen itse ja sitä kautta laitteen sielunmaisemaan tutustuminen oli hyvin mielenkiintoista ja antoisaa. Kuitenkin myös tämän isomman tulevaisuuden vision ääressä työskentely, jossa droonit toissijaisina tehtävinään tuottavat äärimmäisen tarkkoja ja paikallisia sääpalveluita, oli hyvinkin insinöörin mieltä kutkuttavaa hommaa. Äärimmäistä potentiaalia, mutta ei täysin valmista Digi-Salama hankkeen UAV-projekteissa keskityttiin kuluttajille suunnattuihin keskihintatason eli noin tuhannen euron (~1k€) droonimalleihin ja sen tähden tässä ei tarkemmin arvioda ylemmän hintatason eli noin kymmenentuhannen euron(~10k€) tai jo ammattikäyttöön tarkoitettua droonimalleja. Nämä keskihintatason UAV-laitteet osoittivat olevansa täysin valmiita siihen käyttöön, johon ne on suunniteltu: leikkikaluiksi ja lentäväksi kameroiksi. Nöyriksi autonomisiksi teollisuuden palvelijoiksi niistä ei kuitenkaan vielä ole näiden projektien pohjalta. Isoimmiksi esteiksi nousee hyötykuorma-lentoaikasuhde ja lisälaitteiden liitettävyys. Drooneissa lisälaitteiden lisäämiselle on huomattavasti tiukemmat rajoitteet kuin UGV-teknologialla. UGV-laitteilla on isot akut, joista voidaan ottaa surutta virtaa myös lisälaitteille. Droonien akut ovat huomattavasti pienempiä, eikä niistä riitä virtaa samanlailla lisälaitteille. Akkujen kokoa ei myöskään voida kasvattaa tuosta vain, sillä ne lisäävät lennätettävää massaa kaikista komponenteista eniten ja äkkiä tätä myöden tarvitaan taas isommat moottorit ja niille taas isommat akut ja näin ollaan hyötykuorma-lentoaikasuhde ongelman ytimessä. Autonomisen sisälentämisen mahdollistavien lisälaitteiden lisääminen osaksi droonin ohjausjärjestelmää on vielä hyvin vaikeaa, sillä droonien lentäminen on todella aikakriittistä toimintaa. Aikakriittisyydellä tarkoitetaan sitä, että droonin moottorien pitää pystyä reagoimaan ympäristöön sekunnin murto-osissa: esimerkiksi oven avautuessa ja liikuessa droonin liikeradan eteen. Drooni havainnoi näitä tilanteita konenäöllä, ja Digi-Salaman projektien perusteella voidaan nyt saatavilla olevien konenäköalgoritmien todeta olevan liian raskaita droonin kyytiin mahtuvan mikrokontrollerin suorittaa vaadittavassa ajassa. Kirjoittaja: Lauri Ristolainen Konetekniikan insinööri, pääaineena automaatio Digi-Salama-hankkeen projekti-insinööri, nykyinen projektiasiantuntija Lauri.Ristolainen@metropolia.fi Metropolia Ammattikorkeakoulu
Digisalama virtuaalitodellisuudessa
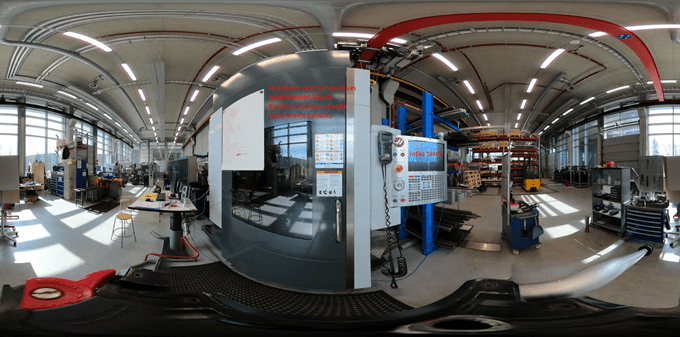
Virtuaalitodellisuus muodosti yhden teema-alueen Digisalama-hankkeessa, jossa viisi Metropolian teema-aluetta ja viisi Vantaan kaupungin kärkiklusterialaa synnyttivät yhteensä 25 projektia. Tavoitteena oli auttaa yrityksiä virtuaalitodellisuuden sovellusten käyttöönotossa ja soveltamisessa. Tämä ei ollut helppo tehtävä, sillä projektihenkilöstölle virtuaalitodellisuus oli varsin uusi tuttavuus. Heti alussa kävi ilmi, että vaikka 3D-mallintaminen ja -mallit olivat tuttuja, niistä ei aivan suoraan virtuaalitodellisuuteen menty. Jopa VR (Virtual Reality)-sovellutuksissa tarvittavat tietokoneet erosivat 3D-mallinnuksessa tarvittavissa tietokoneista. Toiseksi teemaksi nousi RFID (radio frequency identification) eli radiotaajuinen etätunnistus, joka on pitkään tunnettu menetelmä tiedon etälukuun ja -tallentamiseen käyttämällä RFID-tunnisteita eli tageja. RFID:n suosio lisääntyy, koska tiedon luku voi tapahtua ilman näköyhteyttä ja sovelluksesta riippuen pitemmänkin matkan päästä. Seuraavassa kerrotaan toteutuneista projekteista, joissa virtuaalitodellisuus ja/tai RFID olivat mukana. Laivakone Laivakone Oy on erikoistunut laiva- ja teollisuusmoottoreiden huoltopalveluun. Projektissa tavoiteltiin helppoa ja työtä hidastamatonta keinoa dokumentoida huolto- ja korjaustoimenpiteiden oleelliset tapahtumat. Realwear HMT1 AR -lasit oli hankittu projekteja valmisteltaessa ja niiden todettiin soveltuvan hyvin tähän tapaukseen. Lasit toimivat puheohjauksella. Käyttövalikko näkyy toisen silmän näkökenttään sijoitetulla pienellä ruudulla. Samaan pikkuruutuun voi tulla myös ohjeita tekstin, kuvan tai videon muodossa. Puheohjaus mahdollistaa videon tai kuvan ottamisen kypärään liitetyn kameran avulla, kädet työhön vapaina. Asentajat testasivat laseja yrityksen tiloissa. Niiden peruskäyttö oli helppo omaksua. Aktiivisen vastamelutorjunnan johdosta puheohjaus toimii myös meluisissa ympäristöissä. Realwear HMT1 AR -lasien todettiin täyttävän pääosan asetetuista vaatimuksista. Hyvälaatuista videokuvaa sekä still-kuvia voi tallettaa lasien muistikortille. Uudenmaan ruoka Uudenmaan ruoka on paikallisten elintarvikkeiden jakelukeskus eli foodhub. Uusmaalaisten tuottajien kanssa kehitetty toimintamalli lyhentää ruuan reittiä pellolta pöytään. Uudenmaan ruualle toteutettiin RDID-tekniikkaan perustuva tuotteen ja varaston seuranta, joka helpottaa ostotapahtumaa asiakkaan kannalta. Järjestelmä tilausten tekemiseen ja ruokakontin oven avaamiseen oli jo olemassa. Finn-Id avusti projektia demolaitteistolla, joka kytkettiin Uudenmaan ruuan järjestelmään. Ruokakonttiin sijoitettiin RFID-lukija ja tuotteet varustettiin RFID-tageilla. Tällöin niiden saapuminen ja poistuminen kontista oli mahdollista havaita. Lopputuloksena löytyi ratkaisu, jossa pääosa tuotteista voidaan tunnistaa sekä konttiin sisään tuotaessa että sieltä haettaessa. Herttoniemen noutopisteestä tehtiin myös konetekniikan ja pelipuolen opiskelijoiden yhteistyönä virtuaalimalli. Malli teksturoitiin vastaamaan Herttoniemen noutopistettä. Mallissa voi liikkua virtuaalilasein ja tutustua samalla noutopisteeseen. 360 Mediatalo 360 Mediatalo esitteli meille 360 Editorin, jonka avulla 360:n asteen kameralla kuvattuun videoon voi helposti tehdä lisäyksiä. Editoria tarjottiin työkaluksi innovaatioprojekteihin. Konetekniikassa projektiksi valittiin HAAS UMC-75 -työstökeskuksen virtuaalinen perehdytys. Kuvaukset tehtiin GoPro Max -kameralla ja käytön opastava osuus täydennettiin kuvattuun materiaaliin 360 Editorin avulla. Lopputulosta voi katsoa VR-lasien avulla sekä myös suoraan PC:n ruudulta. VimAI VimAI:n sovelluksella voidaan kartoittaa rakennus puhelimen kameraa hyödyntämällä. Voidaan tuottaa myös lisätyn todellisuuden sisätilanavigointi, joka ohjaa haluttuun kohteeseen. Projektissa sovellusta testattiin ensin Myyrmäen kampuksen sisätilassa. Toisessa vaiheessa pyrittiin laatimaan huoltoyhtiötä helpottava sovellus HUS:n huoltotunneliin. Koronatilanteen ja tilojen käyttörajoitteiden takia ei täysin maaliin päästy, mutta saatiin kuitenkin hyödyllistä palautetta projektiin sekä VimAI:lle. Hullu Kimalainen Hullu Kimalainen on liiketoiminnan konsultti, joka käyttää hyötypelejä yritysten sparraamiseen [3]. Projektissa toteutettiin markkina-analyysi, jonka pohjalta suunniteltiin sosiaalista pelaamista hyödyntävä strategiapeli. Siinä simulaattori luo pelinjohtajan asetusten pohjalta sopivan peliympäristön. Pelin avulla voidaan tunnistaa ja kehittää pelaajien vuorovaikutus- ja yhteistyötaitoja. Yhteistyö tuotti yritykselle merkittäviä säästöjä ja antoi suunnan jatkokehitettävälle pelille. Yhteenveto projekteista Virtuaalitodellisuus on pelimaailmassa jo arkipäivää ja laajenemassa sieltä teollisuuden sovellutuksiin. VR-ominaisuuksia on integroitu 3D CAD -ohjelmiin, mikä tuo VR-sovellukset tavallisen insinöörin käyttöön. Nyt VR-tekniikka tukee lähinnä 3D-mallien katselmointia, mutta alue on uusi ja kehittyy koko ajan. Suurinta kiinnostusta soveltamiseen on rakennus- ja arkkitehtuurisuunnittelussa. Koulutukseen ja perehdytykseen virtuaalitodellisuus soveltuu erinomaisesti. 3D-malleista rakentuvan virtuaalitodellisuuden aikaansaanti vaatii osaamista ja kokemusta. 360-kameralla kuvattujen videoiden täydentäminen koulutusmateriaaliksi esimerkiksi 360 Editorilla onnistuu nopeammin ja helpommin. Molemmilla tavoilla saadaan aikaan laadukasta materiaalia, ja niillä on omat vahvuusalueensa. 3D-mallipohjaisesti saadaan räätälöityjä monipuolisia sovelluksia. 360-kameralla tehtyjä sovelluksia voidaan katsoa myös PC:n ruudulta. Lisätyn todellisuuden (AR) sovelluksilla on paljon potentiaalia mm. huollon ja kunnossapidon alueella. AR-lasien kehittyminen ja 5G-yhteyksien tulo avaavat uusia mahdollisuuksia. Projektien tulosindikaattoreita on esitetty tiivistettynä kuvassa 5. Kuvasta selviää, mitä edellä esitellyissä projekteissa on saavutettu. Tiivistetysti sanottuna kuvasta näkyy, että kahdessa projektissa on kehitetty parannettu tuote, joka on yritykselle uusi. Yhteen projektiin on kehitetty tuote, joka on uusi markkinoilla. Kolmessa projektissa on toteutunut kestävän kehityksen ratkaisuja. Valmius teolliseen soveltamiseen Virtuaalitodellisuuden hyödynnettävyys koulutuksessa ja perehdytyksessä on kiistatonta, ja se tukee hyvin itsenäisesti tapahtuvaa opiskelua. Virtuaalitodellisuuden sovelluksille on enenevää tarvetta myös teollisuudessa. Koulutustarvetta on erityisesti sellaisissa yrityksissä jotka haluavat soveltaa tekniikkaa omista lähtökohdistaan ja itsenäisesti. VR-sovellukset ovat käytössä pelimaailmassa mutta harvinaisempia teollisissa sovelluksissa. Tekniikka on helposti käyttöön otetavissa mm. 3D-mallien katselmukseen. Malleissa liikkuminen edellyttää ns. holodeck-tilaa ja tilan varustelua sopivalla laitteistolla. Näissä sovelluksissa VR-lasien käyttö on välttämätöntä. VR-lasien hintahaitari on suuri. Hyvälaatuiset, langattomat ja laajasti yhteensopivat lasit maksavat likimain työaseman verran (2000 - 4000 €). Räätälöityjen koulutussovellusten laatiminen edellyttää enemmän osaamista. Siihen tarvitaan useimmiten aiheeseen perehtyneitä palveluntarjoajia. Nopeamman ja helpommin omaksuttavan vaihtoehdon voivat tarjota 3D-kameroita hyödyntävät ratkaisut. VR-/AR-teknologia on nopeasti kehittyvä ala, jossa laitetekniikka jatkuvasti kehittyy. Kustannusten ja päivitystarpeiden osalta tilannetta voi verrata tietotekniikan uusimiseen. Lähteet: https://kauppa.finn-id.fi/tuote/realwear-msa-v-gard-kypara-etulipalla/ https://360mediatalo.fi/ https://hullukimalainen.fi/ Kirjoittaja: Heikki Paavilainen Digi-Salaman VR/AR/Holodeck teemavastaava Heikki.Paavilainen@metropolia.fi Metropolia University of Applied Sciences Finland
Mobiilirobotiikka liitää ja rullaa Digi-Salamassa

Digi-Salama-hankkeessa tehtiin projekteja kahden vuoden ajan vuosina 2019–2021 viiden teknologiateeman alla implementoiden niitä viidelle Vantaan kaupungin kärkiklusterialalle: logistiikka, elintarvikeala, kiertotalous, älytuotanto ja älykiinteistöt. Syntyi 25 salamaprojektia, joista viisi toteutettiin UxV-teknologiateeman alla. Itse toimin kyseisen teknologian teemavastaavana hankkeen aikana. Hanke alkoi syyskuussa 2019, ja saman vuoden kesäkuussa valmistuneena insinöörinä olin vielä hieman vihreä. Tuntui jopa hurjalta hypätä sormia näpäyttämällä pöydän toiselle puolelle opiskelijasta projekteja ohjaavaksi insinööriksi - lähes opettajaksi. Mikä ihmeen UxV? Autonomisista robottia tarkoittavassa UxV-termissä U ja V tulevat sanoista Unmanaged Vehicle (ei-ohjattu ajoveuvo). X taas voi tarkoittaa sanoja Air (ilma), Ground (maa), Surface (pinta) tai Under Water (pinnan alainen) sen mukaan, millaisessa ympäristössä laitteen on suunniteltu toimivan. Itse arvelen, että tulevaisuudessa saamme käyttöömme vielä s-kirjaimen tarkoittamaan sanaa Space (avaruus). Ensimmäiset turistit ovat jo käyneet avaruudessa, ja tosissaan myös suunnitellaan siirtokuntaa Marsiin. Kehityssuunta on mielestäni selvä, eli ihmisiä ja tavaroita on yhä enemmän tarve kuljettaa myös maapallon vetovoiman ulottumattomissa. Toki miehittämättömiä luotaimia on lähetetty tutkimaan maailmankaikkeutta jo 70-luvulla, mutta en kuitenkaan kutsuisi Voyager 1:tä vielä autonomiseksi robotiksi, koska kaikille UxV-laitteille yhteistä on niiden kyky havainnoida ympäristöään sensoreilla, jotka laitteen ohjausjärjestelmään liitettyinä tarjoavat laitteelle riittävästi dataa omatoimiseen päätöksentekoon. Tällaisia sensoreita ovat mm. 2D- ja 3D-laserkeilaimet eli LiDARit konenäkökamerat ja ultraäänianturit. Voyager 1 ei tee autonomisia päätöksiä vaan lähettää ainoastaan keräämänsä dataa takaisin. UxV-teknologian laitteitta voidaan myös kutsua mobiiliroboteiksi. Onhan ne lähtökohtaisesti suunniteltu liikkumista vaativaan työhön. Täysi potentiaali näistä laitteista lunastetaan, kun ne liitetään osaksi kyberfyysistä järjestelmää (Cyber Physical System, CPS). Mobiilirobotti edustaa järjestelmän fyysistä puolta ja toimii nöyränä palvelijana yrityksen tuotannon- ja toiminnanohjausjärjestelmille (MES ja ERP), jotka edustavat kyberpuolta. Robotti siis saa automaattisesti näiltä taustajärjestelmiltä tehtävänsä, joka voi esimerkiksi olla komponenttien haku varastosta ja toimitus tuotantosolulle. Robotti saa siis taustajärjestelmästä käskyn hakea paikasta A komponentteja ja toimittaa ne paikkaan B. Kuinka näiden pisteiden välinen matka kuljetaan, jää robotin itse pääteltäväksi annettujen reunaehtojen rajoissa. Ehtoja voi olla aina nopeusrajoituksista yksisuuntaisiin kaistoihin ja tietyllä alueella liikkuessa kuulutettavaan äänimerkkiin. Alkuvaiheessa hanketta teknologiateeman nimitys oli vain UGV-tekniikka, sillä alun perin arvelimme projektien keskittyvän vain maan päällä kulkeviin laitteisiin.Tämän oletuksen ja teknologiakartoituksen pohjalta hankittiin MiR100-mobiilirobotti ja toteutettiin sillä pienimuotoinen testiprojekti. Testiprojektissa opiskelijaryhmä suoritti robotille käyttöönoton ja rakensi Myyrmäen kampuksen liikuntasaliin pujotteluradan, josta robotin tuli selviytyä - ja hienosti selvisikin! Yritysverkot vesille ja varsinaiset projektit käyntiin Seuraavassa vaiheessa alettiin etsiä potentiaalisia asiakasyrityksiä soveltamaan uutta teknologiaa toiminnassaan. EKR (ennen koronaa) näitä löytyi myös meikäläisen jalkatyönä messuilta ja konferensseista, mutta myöhemmässä vaiheessa enemmänkin kokeneempien kollegoiden lokeroilla. Viidelle rohkealle ja innokkaalle asiakkaalle lopulta pääsimme uutta osaamista ja teknologiaa soveltamaan. Tässä käydään nämä projektit vain lyhyesti läpi, mutta seuraavissa kahdessa blogitekstissä, jotka on jaettu UGV- ja UAV-postauksiksi, projektien kulkuun ja tuloksiin pureudutaan tarkemmin sekä käydään hankkeen virallisia tulosindikaattoreita läpi projektikohtaisesti. Refair Oy: automaattinen noutovarasto Ensimmäisenä varsinaisena UxV-asiakasprojektina lähdettiin kehittämään automaattisen noutovaraston konseptia Refair Oy:lle. Yritys on kylmä-, ilmastointi- ja lämpöpumpputekniikan maahantuonti- ja tukkuliike. Yrityksellä on monia asiakkaita, joilla saattaa olla tarve saada huoltokeikalle komponentti keskellä yötä. Automaattisella noutovarastolla pyrittiin vastaamaan tähän tarpeeseen. Muutaman erilaisen konseptiehdotuksen pohjalta päätettiin lähteä näistä yhtä jatkokehittämään ja lopulta myös toteuttamaan: ratkaisussa mobiilirobotti MiR100 hakee varsinaisen varaston puolelta kokonaisen varastohyllyn, ajaa RFID-porteista läpi noutotilaan, asiakas kerää hyllystä tarvitsemansa, robotti ajaa uudestaan porteista läpi ja RFID-tunnisteella merkityt tuotteet on luettu molemmilla läpimenokerroilla. Erotuksesta järjestelmä päättelee, mitkä tuotteet asiakas on poiminut ja lähettää laskun. Loval Oy: sisälogistiikan automatisointi mobiilirobotiikalla UGV-tekniikkaa hyödynnettiin myös Loval Oyn tarpeista lähteneessä projektissa, jossa MiR100 näytteli jälleen pääosaa kuten Refairillakin. Loval Oy on lämmityskomponenttien valmistaja Loviisasta. Yritys on yksi Euroopan johtavista putkivastusten, lämmityselementtien ja -ratkaisujen valmistajista. Yrityksen varasto- ja tuotantotilojen suuret etäisyydet ja massiivinen tuotantoliikenne toimivat määrittävinä tekijöinä projektin aihetta ja tavoitteita määriteltäessä. Aiheeksi muodostui sisälogistiikan automatisointi mobiilirobotiikalla. Projektin aikana MiR100 testattiin ja demottiin Lovalin tuotantotiloissa Loviisassa kolmen viikon ajan ja testijakson perusteella pystyttiin todeta teknologiasta olevan hyötyä yritykselle. Demon perusteella pystyttiin myös toteamaan, ettei yksi robotti riitä kokonaisvaltaiseen ratkaisuun. Demossa robotti kuljetti autonomisesti komponentteja varastosta tuotantosolulle. Mevea Oy: törmäyssimulaattori Mevea on simulaatioteknologiayritys, jonka toiminnan keskiössä ovat liikkuvien koneiden fysiikkaan perustuvat digitaaliset kaksoset. Yritys on kehittänyt ohjelmiston, jolla voidaan simuloida muun muassa ajoneuvojen käyttäytymistä eri tilanteissa ja saada hyvin tarkkaa dataa aivan komponenttitasolta asti. Projektin aiheeksi valikoitui törmäyssimulaattorin kehittäminen ajoneuvoille sekä työkalu ajoneuvon osien hallitsemiseen ja tarkasteluun. Projektin aihe osoittautui ennakoitua haastavammaksi, eikä tavoitteisiin aivan päästy. Lopputuloksena syntyi kuitenkin työkalu, jossa on haluttuja ominaisuuksia, mutta ei tarpeeksi pitkälle kehitettynä. Jäi lopulta yrityksen itse päätettäväksi, kannattaako simulaattoria ja työkalua kehittää eteenpäin. Aiforsite: rakennustyömaan etävalvonta ja kuvaaminen droonilla Aiforsite on ohjelmistoyritys, jonka tuotteella voidaan rakentaa hyvin pitkälle kehittynyt rakennuksen tietomalli BIM (Buildin Information Model). Yrityksen nykyisessä järjestelmässä rakennustyömaata kuvataan droonien avulla ulkopuolelta. Sama ratkaisu oli tarkoitus laajentaa toimimaan myös sisätiloissa. Projektin aiheeksi muodostui droonin lennättäminen etäyhteydellä sekä autonomisen sisälentäminen. Etäyhteydellä lentämisestä valmistui toimiva demo, mutta autonominen sisälentäminen osoittautui vielä liian haastavaksi toteuttaa käytössä olleiden droonien suljetuista ohjelmointirajapinnoista. Insta Group + Ilmatieteenlaitos Insta Group Oy on suomalainen perheyritys, jonka toimialoja ovat teollisuusautomaatio, digitaalinen tietoturva ja puolustusteknologia. Yrityksellä on vankkaa osaamista UAV-teknologiasta, ja yritys on tuottanut drooneja sekä droonipalveluita Puolustusvoimille. Instan mielenkiinto kohdistui ilmiöön, jossa kylmissä olosuhteissa propelleihin kertyy jäätä. Ilmiötä kutsutaan jäätämiseksi, ja sillä on vaikutusta drroonin lentokykyyn. Kuinka paljon vaikutusta on ja kuinka jäätäminen voidaan havaita, määrittyivät Instan puolesta projektin tavoitteiksi. Projektissa kolmantena osapuolena toimi Ilmatieteen laitos, joka tuottaa sääpalveluita sekä toimii tutkimuslaitoksena. Tällaisia palveluita ovat muun muassa sääennusteet ja sään lentokelpoisuus tiedot. Projektin tavoitteeksi muodostui parantaa näitä palveluita droonien telemetria- ja anturitiedoista mitattavasta säädatasta. Instan tavoitteiden osalta projekti valitettavasti jäi vajaaksi, koska jäätämistä ei päästy tutkimaan käytännön testeillä ja työ jäi teoriatason selvitykseksi. Projektia on tosin tarkoitus jatkaa myöhemmässä vaiheessa uuden hankkeen osana. IL:n osalta tavoitteisiin päästiin oikein hyvin ja idean toimivuus pystyttiin todentamaan. Raaka vai kypsä? Projektien pohjalta voidaan todeta UxV-teknologian olevan hyvinkin kypsää teollisuuden tarpeisiin. Etenkin juuri teollisuuden tarpeisin kehitetyt UGV-laitteet, kuten MiR100, osoittivat olevansa täysiverisiä ammattilaisia teollisuus 4.0-tuotantomaailmassa. Tosin kuluttajille suunnatut keskihintatason UAV-laitteet osoittivat olevansa vielä hieman raakoja ollakseen muokattavissa pienellä vaivalla teollisuuden tarpeisiin autonomisiksi työmyyriksi - etenkin jos olosuhteet ovat yhtään haastavampia esimerkiksi valaistuksen ja tilojen ahtauden suhteen. Itse kasaamamme drooni antoi paljon suurempia lupauksia täysin autonomisesta lentämisestä sen kokonaan avoimien ohjelmointirajapintojen johdosta. Kuluttajille suunnatuissa valmiissa drooneissa ohjelmointirajapinnat eivät ole ilman ohjelmiston kehityspakettia eli SDK:ta (Software Development Kit) juuri lainkaan auki eikä SDK:llakaan päästy riittävään avoimuuteen. Kun koneoppimis- ja konenäköalgoritmit kehittyvät ja tulevat kevyemmiksi droonin kyytiin mahtuvien mikrokontrollereiden suorittaa, saa täysin autonominen lentäminen huomattavaa lisänostetta. Hankkeen virallisten tulosindikaattorien perusteella voidaan todeta kahdessa projektissa syntyneen uusiutuviin energiaratkaisuihin tai vähähiilisyyteen perustuvaa uutta liiketoimintaa. Kahdessa projektissa myös toteutettiin avoimien rajapintojen kautta uudet sovellukset. Yhdessä projektissa saatiin kehitettyä uusi tai merkittävästi parannettu tuote markkinoille ja toisessa uusi tai merkittävästi parannettu tuote yritykselle. Lähteet: ja 2. Pexels.com Kirjoittaja: Lauri Ristolainen Konetekniikan insinööri, pääaineena automaatio Digi-Salama-hankkeen projekti-insinööri
Digi-Salaman tekoälytapaukset
Tekoäly on teknologia, jota voidaan soveltaa kaikessa digitaalisessa toiminnassa, jossa tarvitaan ohjelmointia. Tämä artikkeli on jatko-osa kirjoitukseen (Tekoälyllä kohti ketterää digisalamointia, Robologi), jossa käsiteltiin tekoälyä Digi-Salaman ja ympäristön suhteen yleisellä tasolla. Digi-Salamassa oli useita projekteja eri toimialoilta. Ne oli jaoteltu teemoittain, joista yksi oli Tekoäly ja koneoppiminen automaatiossa. Tässä katsauksessa tarkastellaan seuraavaksi viittä edellä mainitun teeman osalta projektissa mukana ollutta yritystä. Fleetlogis Fleetlogis Oy on suomalainen tietotekniikkayritys, joka tekee logistiikan tietojärjestelmiä. Yrityksellä on taustaa myös elektroniikka- ja automaatiopuolelta[2], johon liittyen käynnistettiin innovaatioprojekti tutkimaan huoneilman pitoisuuksia, lähinnä hiilidioksidia. Projektin käynnistysvaiheessa Fleetlogisin edustaja ilmaisi yrityksen kiinnostuksen ja tarpeen kehittää verkkovirralla toimiva etäluettava ilmanlaadun mittaussalkku hyödyntäen antureita ja Teltonika FMB120 -seurantalaitetta, joka lähettää dataa Fleetlogis Oy:n käyttämälle palvelimelle mobiilisti sim-kortin avulla. Tavoitteena oli selvittää mittaustulosten tarkkuus, mutta Digi-Salama-projektin päämääräksi rajattiin luokkahuoneen todellisen käytön kartoittaminen. Tämä tehtiin mittaamalla ilmasta paikalla olijoiden tuottamaa lämpötilaa, kosteutta sekä hiukkasia ja tarkastelemalla tuloksia suhteessa luokan varauslistaan. Projektissa hyödynnettiin Fleetlogisin omia laitteita. Datan lukemiseen käytettiin Fleetlogis Flex -nettisivua, josta voi lukea mittaustulokset ja luoda niistä erilaisia grafiikoita ja raportteja. Antureiden konfigurointiin käytettiin Teltonika Configurator -ohjelmaa. Fin-Chinagate Fin-Chinagate-yrityksen visiona on tuoda suomalaista teknologiaa esille Kiinassa sekä luoda alusta kansainväliselle kommunikaatiolle Kiinan ja Suomen välille nykyteknologioita hyödyntäen.[3] Fin-Chinagate uskoo, että uusien teknologioiden käyttö on askel kohti maiden välistä yhteistyötä, erityisesti yritysten ja korkeakoulujen kesken. Digi-Salama-hanke kokeili yhdessä yrityksen kanssa kommunikointi- ja etäopiskelualustaa Kiinan ja Suomen välillä. Testissä käytettiin kiinalaista Mythware-järjestelmää sekä Fin-Chinagaten kehittämää Smart System -konseptia, joka sisältää simultaanitulkkauksen kääntäen englannin kieltä kiinaksi ja kiinaa englanniksi suorassa lähetyksessä. Osana projektia Digi-Salama etsi myös seuraavia askeleita varten halukkaita yhteistyökumppaneita Smart Systemin jatkotestaamista varten. Tavoitteena on huomioida eurooppalainen säännöstö, etenkin GDPR, koska tiedonkäsittelyssä sovellettavat palvelimet sijaitsevat Kiinassa. Fonecta Fonecta kerää ja ylläpitää henkilöiden ja yritysten kontaktitietoja. Kokoamiensa tietokantojen avulla Fonecta palvelee asiakkaitaan tarjoamalla ajantasaisia yhteystietoja.[4] Fonectan ongelmina ovat usein vaihtuvat yhteystiedot ja tasalaatuisen datan puute. Yllä pidettävistä tiedoista muuttuu vuosittain suuri osa, ja nämä muutokset tulevat asiakkailta itseltään. Tällöin on hankalaa hallita tietojen eheyttä: Ovatko kaikki tiedot syötetyt järjestelmään? Muun muassa yritysten web-osoitteet ovat usein puutteellisia. Ovatko tiedot oikein tallennetut? Ovatko esimerkiksi osoitetiedot asianmukaisesti syötetyt, jotta paikantaminen olisi mahdollista? Ihmistyönä kyseessä on hankala urakka, koska virheelliset ja epäilyttävät rivit pitää ensin etsiä ja sitten analysoida. Tehtävä kuulostaa sopivalta robotille, mutta siltäkin vaaditaan älykkyyttä mukautumattomien sääntöjen sijaan. Fonectan Digi-Salama-projektit etenivät kahdessa vaiheessa: ensin olivat vuorossa innovaatioprojektit ja niistä jatkoksi tehty opinnäytetyö. Innovaatioprojektiosuudessa käytiin läpi tarpeita ja mahdollisia ratkaisumalleja, joista vaihtoehdoiksi nousivat ohjelmistorobotiikka ja luonnollisen kielen prosessointi (Natural Language Processing - NLP). NLP:n avulla saavutettuja lupaavia tuloksia lähdettiin kehittämään edelleen opinnäytetyönä. Sime Sime Oy on insinööritoimisto, joka on erikoistunut automaattiseen palkkien käsittelyyn ja siirtelyyn. Projektiaiheena oli tutkia mahdollista alumiinituotannon robotisointia tai kobotisointia edellä mainitussa työskentelyssä. Palkkien siirtämisessä tarvittavien koukkujen annostelua tehdään tällä hetkellä käsin. Koukut kerätään alumiiniprofiilien purkamisen yhteydessä, jonka jälkeen ne puhdistetaan ja tuodaan takaisin alkupisteeseen. Alkupisteessä työntekijät asettavat koukut alumiiniprofiileihin toisesta päästä, ja toisesta päästä koukut ripustetaan kuljettimeen. Projektin tavoitteena oli tuotannon nopeuttaminen sekä fyysisen työn keventäminen mahdollisella robotilla tai kobotilla. Kobotin ja robotin avuksi tarvitaan myös konenäköä, antureita sekä koukkujen annostelija, jotta koukkuja pystyttäisiin ottamaan helposti. Projektiryhmä kehitti toteutukselle kaksi vaihtoehtoa, joista tehtiin yksinkertaistetut simulaatiot. Simulaatioiden avulla nähtiin, että teoriassa robotti kykenee suorittamaan ripustuksen molemmissa vaihtoehdoissa, mutta ratkaisujen toimiminen käytännössä vaatisi kokeiluja oikeilla kappaleilla. Simulaatioissa käytettiin ABB:n IRB 1600 -robottia, koska se täytti parhaiten annetut kriteerit. Digi-Salaman aikana tehtiin myös IoT-tekniikoiden käyttöönottoon liittyvä opinnäytetyö. Siinä otettiin esille meneillään oleva suuntaus, jossa vanhempaan teknologiaan perustuvia laitteistoja voidaan päivittää IoT-maailmaan.[7] Assemblin Assemblin Oy on vuonna 2006 perustettu kiinteistötekniikan yritys, joka tarjoaa ilmaan, veteen ja energiaan liittyviä järjestelmiä Suomessa, Ruotsissa ja Norjassa.[8] Assemblin osallistui Digi-Salamaan innovaatioprojektin ja opinnäytetyön teettäjänä. Tavoitteena oli kehittää kiinteistön lämpötilan hallintaa ohjaavaa tekoälyä hyödyntäen Ilmatieteen laitoksen tarjoamaa sääennuste- ja auringonsäteilydataa. Yrityksellä itsellään oli jo kokemusta älykkäiden algoritmien soveltamisessa lämmityksen/viilennyksen tarpeen ennustamisesta. Nyt tämä tehtävä annettiin Digi-Salaman yhteyteen käynnistetylle innovaatioprojektiryhmälle syksyllä 2020. Myöhemmin keväällä 2021 projektissa aloitettua työtä päätettiin syventää opinnäytetyöksi. Projektissa oli neljä vaihetta. Ensimmäisessä vaiheessa tutustuttiin Assemblinilta saatuun testilaitteistoon ja perehdyttiin sen toimintaan. Toisessa vaiheessa testilaitteella vastaanotettiin testidataa ja tutustuttiin testilaitteen toimintaan käytännössä. Kolmannessa vaiheessa tehtiin testaus pienoismallin avulla. Pienoismallissa rakennuksena käytettiin laatikkoa, johon asennettiin lamppu simuloimaan lämmitintä sekä anturi mittaamaan lämpötilaa laatikon sisältä. Testien perusteella selvitettiin, miten laitteisto toimii ja tehtiin hienosäätöjä tarvittaessa. Neljäs ja viimeinen vaihe sisälsi testauksen isommassa mittakaavassa Myllypuron kampuksella. Siellä valittua tekoälyalgoritmia käytettiin ohjaamaan Myllypuron kampuksen testitiloja. Samalla seurattiin niiden energian käyttöä jota pyrittiin myös optimoimaan. Vaikutukset osallistuneiden yritysten kilpailukykyyn Tekoälyä soveltaneiden projektien seurauksena yritykset saivat uusia näkökulmia kilpailukykynsä parantamiseksi. Näitä olivat mittausten pohjalta tehtävät ennustukset ja niihin liittyvät toimenpiteet. Esimerkkeinä voidaan mainita Assemblin ja Fonecta, joista molemmilla oli jo entuudestaan jonkin verran kokemusta tekoälyn soveltamisesta. Digi-Salamaan osallistuminen synnytti molemmissa yrityksissä myös joukon uusia ajatuksia ulkopuolisen datan hyödyntämiseksi tekoälymallien kehittämisessä. Seuraava askel voi olla syväoppimisen käyttöönotto niin mallin opettamisessa kuin sen vahvistamisessa. Fonectalle puolestaan kasvoi lisää osaamista NLP:n uusimpien teknologioiden käyttämisessä älykkääseen aineiston tarkastamiseen ja muokkaamiseen. Koneoppimisen ja tekoälyn tulosindikaattorit Digi-Salamassa 16 20 21 22 CO04 CO28 CO29 Fleetlogis 1 1 0 0 1 0 1 Fin-China 1 1 0 0 1 0 1 Fonecta 1 0 0 0 1 0 1 Sime 1 0 0 0 1 0 0 Assemblin 1 1 0 1 1 0 0 Taulukon tunnusten selitykset 16 Yritys, joka käynnistää TKI-toiminnan tai TKI-yhteistyön yliopistojen, korkeakoulujen tai tutkimuslaitosten kanssa 20 Yritys, johon syntyy uusiutuviin energiaratkaisuihin tai vähähiilisyyden tukemiseen perustuvaa uutta liiketoimintaa 21 Start-up yritys, jolla on merkittävät valmiudet uuden tuotteen, palvelun tai tuotantomenetelmän kehittämiseen 22 Yrityksen avoimen tiedon ja rajapintojen avulla toteuttamat uudet sovellukset CO04 Muuta tukea kuin rahoitustukea saava yritys CO28 Yritys, joka kehittää uuden tai merkittävästi parannetun tuotteen markkinoille (tuote on uusi markkinoilla) CO29 Yritys, joka kehittää uuden tai merkittävästi parannetun tuotteen markkinoille (tuote on uusi yritykselle) Fleetlogis Yritykselle syntyi osittain uusi IoT-pohjainen sovellus, joka auttaa logististen operaatioiden suunnittelussa ja optimoinnissa. Tämä tukee CO2-jalanjäljen pienentämistä. Fin-China Yritykselle syntyi testausvalmis etäneuvottelukonsepti + tämä tukee VR/AR-pohjaista yhteydenpitoa ilman matkustamista. Tämä tukee CO2-jalanjäljen pienentämistä. Fonecta Yritykselle syntyi uusi koneoppimispohjainen sovellus asiakastietojen käsittelyyn. Sime Yritykselle syntyi uutta tietämystä kobotiikasta ja koneoppimisesta sekä uusi alustava konsepti IoT-laitteistosta, jolla koneoppimista voitaisiin hyödyntää. Assemblin Yritykselle syntyi valmiuksia käyttää koneoppimista kiinteistöautomaation ohjauksessa. Tämä tukee CO2-tavoitteita energiansäästön muodossa. Lähteet: Kuvituskuva Wikimediasta: <https://commons.wikimedia.org/wiki/File:Lightning_3025.jpg> Verkkosivu. Saatavana osoitteesta: <https://www.fleetlogis.fi>. Luettu 2.12.2021. Verkkosivu. Saatavana osoitteesta: <https://www.finchinagate.fi>. Luettu 2.12.2021. Verkkosivu. Saatavana osoitteesta: <https://www.fonecta.fi>. Luettu 2.12.2021. Kuvituskuva Wikimediasta: <https://commons.wikimedia.org/wiki/File:Telephone_operators,_1952.jpg> Kuvituskuva Unsplashista: <https://unsplash.com/photos/oqY09oVTa3k> Osman, A.: Toimipisteen etäohjaus ja -seurantaRaspberry Pin avulla. Opinnäytetyö 2021. 37 s. Verkko-osoite: <https://urn.fi/URN:NBN:fi:amk-2021113022759>. Luettu 2.12.2021. Saatavana osoitteesta: <https://fi.assemblin.com>. Luettu 2.12.2021. Otava, A.: Koneoppimisen hyödyntäminen kiinteistöautomaatiossa. Opinnäytetyö 2021. 29 s. Verkko-osoite: <https://urn.fi/URN:NBN:fi:amk-2021052010011>. Luettu 2.12.2021. Kirjoittaja: Aarne Klemetti työskentelee tutkijaopettajana Metropolia Ammattikorkeakoulussa. aarne.klemetti@metropolia.fi
Tekoälyllä kohti ketterää digisalamointia
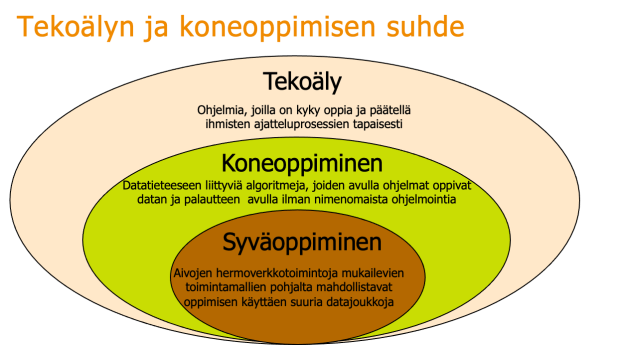
Tekoälyn avulla erilaisten tietojärjestelmien toiminnallisuutta voidaan laajentaa käsittämään inhimillisiksi katsottavia taitoja, kuten omatoimista päättelyä, oppimista ja suunnittelemista. Tekoäly osaa työskennellä väsymättömästi oppimallaan rajatulla alueella. Oppiminen tapahtuu joko asiantuntijan sanoittaman eli leimaaman aineiston avulla tai itseoppivasti. Itseoppivuus toteutuu annetun säännöstön ja datan avulla tai tutkimalla ympäristöä käytettävissä olevilla tunnistimilla ja toimilaitteilla. Tekoälyn tuottaminen esimerkiksi koneoppimisen avulla on vaativa laskentatehtävä, jossa tyypillisesti tarvitaan runsaasti dataa ja laskentatehoa. Kun tekoälymalli on saatu opetettua, voidaan se siirtää suoritettavaksi päätelaitteisiin, esimerkiksi kannettaviin tietokoneisiin, älypuhelimiin ja vaikkapa ympäristöään tarkkaileviin ajoneuvoihin. Tekoäly ei ole käyttöönoton jälkeen samalla tavalla lopullinen kuten perinteinen, versioitava tietokoneohjelma, vaan se kehittyy koneoppimisen avulla käytön myötä. Tekoäly on poikkeuksetta erikoistunut oppimaansa ympäristöön: shakkitekoäly on voittamaton shakinpeluussa, mutta ei osaa ajaa autoa. Vastaavasti kuva-analyysitekoäly, joka tunnistaa luotettavasti ihosyövän valokuvien perusteella, ei tiedä, mikä on auton rekisterikilpi. Keskeinen kysymys on se, mitä, miten ja millä aineistolla tekoälyn annetaan oppia.[2] Puuttumatta eettisiin näkökulmiin on tärkeää, että aineiston valinnasta päättävä asiantuntija rajaa tehtävät selkeisiin kokonaisuuksiin: ei kannata pyrkiä kovin kattavaan tekoälyyn, koska se on todennäköisesti liian laaja opetettavaksi ja hallittavaksi. Sen sijaan joukko testatusti toimivia, rajattuja tekoälyjä nostaa tuottavuutta ja päätöksenteon luotettavuutta merkittävästi.[3] Digi-Salamassa tekoäly ja koneoppiminen automaatiossa oli omana teemanaan. Tavoitteena oli ymmärtää ja oppia soveltamaan tarvittavia toimintamalleja, datan keruuta ja muokkausta sekä koneoppimisen periaatteita suhteessa tavoitteisiin. Lisäksi pyrittiin saavuttamaan näkemys siitä, millä tasolla valittujen kohdeyritysten tekoälyosaaminen on ja miten mahdollisiin tarpeisiin voidaan vastata opetussuunnitelmissa. Tekoäly ja YK:n kestävän kehityksen tavoitteet Yhdistyneiden kansakuntien jäsenmaat sopivat vuonna 2015 Agenda 2030:stä, jossa pyritään edistämään kestävää kehitystä aikavälillä 2016-2030. Suunnitelma jaettiin 17 tavoitteeseen, jotka ohjaavat kestävän kehityksen edistämistä.[4] Tekoäly voidaan nähdä mahdollistavana tekijänä näiden tavoitteiden saavuttamisessa. Koko tavoitteisiin pyrkimisen prosessin ajan pitää kerätä ja analysoida dataa, jonka avulla voidaan luoda älykkäitä malleja päätöksenteon tueksi. Esimerkiksi voidaan ottaa älykäs talotekniikka, jonka optimointi säästää energiaa, tuottaa ilmakehään vähemmän hiiliyhdisteitä ja parantaa sisätiloissa oleskelun laatua - vaikuttaa siis osaltaan myös terveyteen. Kestävään kehitykseen liittyvät tekoälymallit eivät synny tyhjästä ja ilman laskentaa. Laskenta on usein niin vaativaa, että siinä tarvitaan supertietokoneen laskenta- ja tallennuskapasiteettia useiden päivien ajan. Se puolestaan kuluttaa myös energiaa. Tutkimuksissa on kehitetty erilaisia mittaustapoja tekoälyyn liittyvien laskentatarpeiden energiankulutuksen huomiointiin. Tarvittavia algoritmeja voidaan optimoida käytön myötä vastaavalla logiikalla kuin itse tekoälyäkin. Vaatimuksia koulutukselle Tekoäly ja koneoppiminen ovat monimutkaisia asioita, joiden tuotantomittaisen soveltamisen hidastavana tekijänä on useimmiten puutteellinen osaaminen. Tätä paikatakseen yritykset pyrkivät kouluttamaan henkilöstöään ja toisaalta ulkoistamaan tarvittavia osaamisia. Nämä molemmat vaihtoehdot sopivat luontevasti ammattikorkeakouluympäristöön, koska opiskelijaryhmien ja opinnäytetöiden avulla voidaan testata ja kehittää erilaisia konsepteja ja prototyyppejä. Tekoäly tieteenä soveltuu tiedekorkeakoulujen opetusohjelmiin ja tutkimuslaitoksiin - alempien oppilaitosten näkökulmasta tarvitaan pikemminkin sovellusosaamista kautta linjan. Tärkeämpää kuin tekoälyn ja koneoppimisen syvällinen ymmärtäminen on käsittää se, miten näitä teknologioita voidaan käytännössä soveltaa ja millaisia kyvykkyyksiä kannattaa sisällyttää yritysten ja oppilaitosten osaamiseen. Kustannuksiltaan tekoälyn ja koneoppimisen soveltaminen ei ole enää kynnyskysymys. Avoimen lähdekoodin alustoilla on tarjolla laaja valikoima kehitystyökaluja algoritmeineen. Niiden käyttämisessä tulee poikkitieteellisiin tiimeihin lisätä data- ja tekoälyosaamista sisältöammattilaisten tueksi. Lisäksi korkeakouluilla on pääsy vaativaa laskentaa tarjoaviin supertietokoneympäristöihin, jolloin myös suurten datajoukkojen käsittely ja koneoppiminen on mahdollista toteuttaa skaalautuvasti. Tärkeämpää kuin jokaisen toimijan ammattimainen tekoälyosaaminen on se, että pystytään tunnistamaan datan eri prosessivaiheiden hallinta: mitä on kerättävä data, mistä sitä voidaan kerätä, mitä sillä voidaan tehdä ja mitä se merkitsee? Näin ollen on syytä ennemminkin tietää, kuka tietää ja mitä pitää tietää, kuin vaatia kaikilta osapuolilta samantasoista teknologista ymmärrystä. Seuraava askel kohti älykkäämpää automaatiota - toimialasta riippumatta - on sen ottaminen osaksi normaalia toimintaa. Tätä tarkoitusta varten opetussuunnitelmiin kannattaa lisätä ainakin käytännölliset, omaa osaamisaluetta palvelevat kurssit esimerkiksi intensiivitoteutuksina. Lisäksi aiheeseen syvällisempää perehtymistä varten tulee tarjota mahdollisuudet ainakin koodaamiseen ja ohjelmistotuotantoon keskittyville opiskelijoille. Lähteet: Kuvituskuva Pixabaysta: <https://commons.wikimedia.org/wiki/File:Artificial-Intelligence.jpg> 6 Biggest Limitations of Artificial Intelligence Technology. Verkkosivu. Saatavana osoitteesta:<https://hackernoon.com/the-missing-pieces-6-limitations-of-ai-s85r3upr>. Luettu 2.12.2021. 5 + 1 myyttiä tekoälystä. Verkkosivu. Saatavana osoitteesta: <https://www.aaltopro.fi/aalto-leaders-insight/2019/5-1-myyttia-tekoalysta>. Luettu 2.12.2021 Kestävän kehityksen tavoitteet. Verkkosivu. Saatavana osoitteesta: <https://www.ykliitto.fi/yk-teemat/kestavan-kehityksen-tavoitteet>. Luettu 2.12.2021. Lisätietoja aiheesta kiinnostuneille: Tekoäly, Wikipedia. Verkkosivu. Saatavana osoitteessa: <https://fi.wikipedia.org/wiki/Tekoäly>. Luettu 2.12.2021. Koneoppiminen, Wikipedia. Verkkosivu. Saatavana osoitteessa: <https://fi.wikipedia.org/wiki/Koneoppiminen> Luettu 2.12.2021. Metropolia edistää kestävän kehityksen osaamista ainutlaatuisen tekoälyratkaisun avulla. Metropolian ajankohtaisten uutisten verkkosivu. Saatavana osoitteessa: <https://www.metropolia.fi/fi/metropoliasta/ajankohtaista/uutiset/metropolia-edistaa-kestavan-kehityksen-osaamista-ainutlaatuisen-tekoalyratkaisun-avulla>. Luettu 2.12.2021. YK:n arvot tekoälykehityksen tienviittana. Politiikasta-sivuston verkkosivu. Saatavana osoitteessa: <https://politiikasta.fi/ykn-arvot-tekoalykehityksen-tienviittana/>. Luettu 2.12.2021. Eettinen tekoäly ja algoritmit. Helsingin Yliopiston verkkosivu. Saatavana osoitteessa: <https://www.helsinki.fi/fi/ajankohtaista/ihmisten-teknologia/eettinen-tekoaly-ja-algoritmit>. Luettu 2.12.2021. Sivonen, A., Heikkinen, K.: Tekoäly - uhka vai mahdollisuus amk-opettajalle. Verkkosivu Haaga-Helia eSignals. Saatavana osoitteessa: <https://esignals.fi/kategoria/pedagogiikka/tekoaly-uhka-vai-mahdollisuus-amk-opettajalle/#0dde0fb1>. Luettu 2.12.2021. Kirjoittaja: Aarne Klemetti työskentelee tutkijaopettajana Metropolia Ammattikorkeakoulussa. aarne.klemetti@metropolia.fi