

Tämä kirjoitus on jatkoa Mobiilirobotiikka liitää ja rullaa Digi-Salamassa blogille ja tässä käydään tarkemmin läpi Digi-Salama hankkeessa toteutetut UAV-projektit (Unmanaged Air Vehicle).
Ensimmäisenä UAV-projektina lähdettiin toteuttamaan rakennustyömaan etävalvontaa droonien avulla Aiforsite Oy:n kanssa. Yrityksellä on toimiva systeemi työmaan ulkopuolelta kuvaamista varten, ja Digi-Salaman projektiaiheeksi valikoitui työmaan kuvaaminen rakennuksen sisältä. Ulkona lentävien droonien tuottamaa videosyötettä ja niiden keräämää dataa ympäristöstä käytetään hyväksi rakennuksen tietomallia (BIM) rakennettaessa.
Droonien välittämästä videosyötteestä yritys pystyy algoritmien avulla laskemaan työmaan valmiusasteen ja jopa tarkastamaan, ovatko työkalut ja koneet tallessa. Tällä hetkellä sisätilat kuvataan kypäräkameralla. Monikerroksisen kerrostalon läpi käveleminen on aikaa vievää, eikä ehkä insinöörin mieluisintakaan hommaa. Autonomista sisälentämistä varten tutkittiin erilaisia droonimalleja ja päädyttiin valitsemaan DJI:n Mavic Pro. Laite valikoitui pienen kokonsa ja sille valmiiksi tarjolla olevan SDK:n (Software Development Kit) takia.
Tavoitteena autonominen sisälentäminen
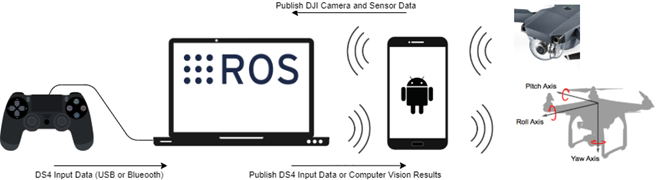
Projektin tavoitteeksi muodostui lopulta välittää droonin videosyötettä reaaliajassa yrityksen palvelimille, toteuttaa etäohjausjärjestelmä ja tutkia autonomisen sisälentämisen mahdollisuuksia. Projektin edetessä kävi selväksi, että valitulla droonimallilla on suuria rajoitteita autonomisen lentämisen suhteen. Sen integroidut sensorit eivät yksinkertaisesti tarjonneet tarpeeksi dataa autonomista lentämistä varten, eikä SDK ole vielä täysin valmis. Sen johdosta laitteeseen oli tässä vaiheessa mahdotonta liittää sensoreita tuottamaan autonomisen lentämisen mahdollistava lisäinformaatio. Videosyötteen välittämisestä ja etälennätyksestä valmistui proof-of-consept tasoinen demo, jolla pystyttiin osoittamaan näiden toimintojen olevan mahdollisia toteuttaa ja niiden olevan hyödyllisiä yrityksen kannalta. Tämä projekti oli mielestäni hyvä esimerkki siitä, että aina ei tarvitse onnistua täydellisesti, jotta työstä olisi kuitenkin paljon hyötyä. Yrityksellä itsellään on paljon osaamista kyseisen teknologian saralla, mutta silti hekin olisivat lähteneet liikkeelle meidän kanssamme samasta nolla pisteestä projektia käynnistäessä. Saimme siis taklattua mahdottomia vaihtoehtoja pois ja hieman tasoitettua polkua kohti autonomista .
Droonilennätyksestä sääpalveluiksi
Toinen, hieman erilainen, lähestymistapa UAV-tekniikan hyödyntämiseen löytyi Ilmatieteen laitoksen (FMI) tarpeista ja velvollisuudesta tuottaa mahdollisimman hyviä eli tarkkoja sääpalveluita. Tällaisia palveluita omat muun muassa sääennusteet ja sään lentokelpoisuus tiedot. Visiona on, että kun jonain päivänä, ei niin kaukana tulevaisuudessa, droonit kuljettavat yötä päivää paketteja taivaalla, niin niiden pääasiallisen kuljetustyön ohella voitaisiin tuottaa hyvin tarkkaa dataa tuulesta, lämpötilasta sekä ilmankosteudesta ja -paineesta. Näin saataisiin kerättyä suuri määrä dataa, josta algoritmein laskemalla voidaan päätellä sääolosuhteet erittäin lokaalisti ja saada tarkkaa tietoa sään ominaisuuksista eri korkeuksissa. Dataa kerätään drooniin liitetyillä tuuli-, kosteus- ja ilmanpaineantureilla.

Lisäksi tuulesta saadaan myös dataa droonin moottorien telemetriatiedoista. Telemetriatiedoista tuulen päättelyä voi olla hyvä avata esimerkillä: Kuvitellaan, että droonin tehtävä on leijua ilmassa paikallaan. Tuulettomissa olosuhteissa droonin kaikki moottorit tekevät työtä täsmälleen yhtä paljon ja ohjainyksikkö antaa jokaiselle moottorille saman ohjearvon. Ohjearvon ja oloarvon välillä ei ole tällöin eroa, kun drooni siis leijuu ilmassa paikallaan. Kun alkaa tuulla, droonin moottorit pyrkivät kompensoimaan tätä ulkopuolelta tulevaa vaikutusta. Tällöin ohjearvon ja oloarvon välille syntyy erotus, jonka ohjainyksikkö pyrkii kompensoimaan käskemällä oikeiden moottorien tehdä lisää työtä. Tästä moottorien tekemästä lisätyöstä voitaisiin lopulta algoritmien avulla päätellä tuulen suunta ja voimakkuus.
Telemetriatiedoista oli kiinnostunut myös toinen projektiin osallistunut yritys Insta Group Oy. Insta Group Oy on suomalainen perheyritys, jonka toimialoja ovat teollisuusautomaatio, digitaalinen tietoturva ja puolustusteknologia. Heillä on itsellään vankkaa osaamista drooniteknologiasta ja yritys on tuottanut drooneja sekä droonipalveluita Puolustusvoimille. Instan mielenkiinto kohdistui ilmiöön, jossa kylmissä olosuhteissa propelleihin kertyy jäätä. Ilmiötä kutsutaan jäätämiseksi ja sillä on vaikutusta droonin lentokykyyn. Kuinka paljon vaikutusta on ja kuinka jäätäminen voidaan havaita, määrittyivät Instan puolesta projektin tavoitteiksi.
Syksyn 2020 aikana projekti käynnistettiin konetekniikan ja IT-puolen opiskelijaryhmien kanssa. Tavoitteiksi määritettiin säädatan ja telemetriatietojen kerääminen ja niiden välittäminen Ilmatieteen laitoksen rajapintaan. Aluksi konetekniikan projektiryhmä valitsi komponentit itse kasattavaan droniin, kokoonpani ja varusti sen tarvittavilla antureilla. FMI:n kanssa tehtiin useita mittauslentoja kiinteiden sääasemien läheisyydessä sekä FMI:n omien droonien kanssa referenssidatan saamiseksi. Kun dataa oli saatu kerättyä ja todettu sen olevan tarpeeksi yhteneväistä referenssidatan kanssa, alkoi vasta sitten it-opiskelijoiden työ. Anturi- ja telemetriadatan eteenpäin välittäminen, tallentaminen sekä tätä tietoa käsittelevän algoritmin kehittäminen muodostuivat it-opiskelijoiden projektin tavoitteiksi. IT-ryhmän päästessä todella vauhtiin vasta kun konetekniikan ryhmä oli saanut droonin koottua ja dataa kerättyä, muodostui aikataulu ryhmälle liian tiukaksi aiheen haastavuuteen nähden. Ryhmän lopputulokseksi jäi, ettei toimivaa koneoppimismallia saatu aikaan, mutta dataa saatiin visualisoitua Excelin ja Scikit-learn-koneoppimisalustan avulla. Projektin aikana valitettavasti ei saatu käytännön tasolla selvitettyä jäätämistä lainkaan. Metropolialla on Myyrmäen kampuksella olosuhdehuone, jossa jäätämistä olisi voitu tutkia, mutta se oli vuokrattu samaan aikaan moneksi kuukaudeksi VTT:n käyttöön. Lopulta Instan asettamiin tavoitteisiin pystyttiin vastaamaan vain kirjallisuusselvityksen tasolla, jonka toteutti projektiryhmien työtä jatkamaan palkattu projektiassistentti.
Projektiassistentiksi valikoitui opinnoissaan loppusuoralla oleva sähköautomaation opiskelija. Hänen osaamisensa vastasi erinomaisesti projektin tarpeita, sillä hänellä oli kokemusta sekä elektroniikasta että datan käsittelystä. Assistentin työn tavoitteena oli kerätä dataa ja kehittää tiedonsiirron malli, jolla data saataisiin siirrettyä Ilmatieteen laitoksen rajapintaan sekä tutkia jäätämistä. Tuloksena kehitettiin lähetyslaatikko, joka toteutti tiedonkeruun ja -siirron onnistuneesti sekä edellä mainittu kirjallisuusselvitys jäätämisen vaikutuksesta droonin lentämiseen. Tämä Projekti on eittämättä yksi mielenkiintoisimmista, joissa olen ollut lyhyen urani aikana mukana. Pelkästään droonin kasaaminen itse ja sitä kautta laitteen sielunmaisemaan tutustuminen oli hyvin mielenkiintoista ja antoisaa. Kuitenkin myös tämän isomman tulevaisuuden vision ääressä työskentely, jossa droonit toissijaisina tehtävinään tuottavat äärimmäisen tarkkoja ja paikallisia sääpalveluita, oli hyvinkin insinöörin mieltä kutkuttavaa hommaa.

Äärimmäistä potentiaalia, mutta ei täysin valmista
Digi-Salama hankkeen UAV-projekteissa keskityttiin kuluttajille suunnattuihin keskihintatason eli noin tuhannen euron (~1k€) droonimalleihin ja sen tähden tässä ei tarkemmin arvioda ylemmän hintatason eli noin kymmenentuhannen euron(~10k€) tai jo ammattikäyttöön tarkoitettua droonimalleja. Nämä keskihintatason UAV-laitteet osoittivat olevansa täysin valmiita siihen käyttöön, johon ne on suunniteltu: leikkikaluiksi ja lentäväksi kameroiksi. Nöyriksi autonomisiksi teollisuuden palvelijoiksi niistä ei kuitenkaan vielä ole näiden projektien pohjalta.
Isoimmiksi esteiksi nousee hyötykuorma-lentoaikasuhde ja lisälaitteiden liitettävyys. Drooneissa lisälaitteiden lisäämiselle on huomattavasti tiukemmat rajoitteet kuin UGV-teknologialla. UGV-laitteilla on isot akut, joista voidaan ottaa surutta virtaa myös lisälaitteille. Droonien akut ovat huomattavasti pienempiä, eikä niistä riitä virtaa samanlailla lisälaitteille. Akkujen kokoa ei myöskään voida kasvattaa tuosta vain, sillä ne lisäävät lennätettävää massaa kaikista komponenteista eniten ja äkkiä tätä myöden tarvitaan taas isommat moottorit ja niille taas isommat akut ja näin ollaan hyötykuorma-lentoaikasuhde ongelman ytimessä. Autonomisen sisälentämisen mahdollistavien lisälaitteiden lisääminen osaksi droonin ohjausjärjestelmää on vielä hyvin vaikeaa, sillä droonien lentäminen on todella aikakriittistä toimintaa. Aikakriittisyydellä tarkoitetaan sitä, että droonin moottorien pitää pystyä reagoimaan ympäristöön sekunnin murto-osissa: esimerkiksi oven avautuessa ja liikuessa droonin liikeradan eteen. Drooni havainnoi näitä tilanteita konenäöllä, ja Digi-Salaman projektien perusteella voidaan nyt saatavilla olevien konenäköalgoritmien todeta olevan liian raskaita droonin kyytiin mahtuvan mikrokontrollerin suorittaa vaadittavassa ajassa.
Kirjoittaja:

Lauri Ristolainen
Konetekniikan insinööri, pääaineena automaatio
Digi-Salama-hankkeen projekti-insinööri, nykyinen projektiasiantuntija
Lauri.Ristolainen@metropolia.fi
Metropolia Ammattikorkeakoulu




Kommentit
Ei kommentteja