

Termiä digitaalinen kaksonen käytetään yleisesti teollisuudessa ja tiedeyhteisössä; käsitteen tarkka määritelmä on kuitenkin vielä tutkimuksen alla. Kaksosen käytön käsite on saanut alkunsa NASA:n Apollo-ohjelmasta 60-luvulta, jossa rakennettiin kaksi identtistä avaruusalusta, jolloin insinöörit pystyivät peilaamaan ja simuloimaan avaruusaluksen olosuhteet operaation aikana. Maan päälle jäänyttä alusta kutsuttiin kaksoseksi.

Apollo-kuualus (NASA)
Nykyään nimellä Digital Twin (DT) tunnettu konsepti otettiin käyttöön vuonna 2002 Michael Grievesin toimesta. Aikaisempien tutkimuksien DT-määritelmät korostavat, että kukin järjestelmä koostuu kahdesta järjestelmästä, fyysisestä järjestelmästä ja virtuaalisesta järjestelmästä, joka sisältää kaiken fyysistä järjestelmää koskevan tiedon.
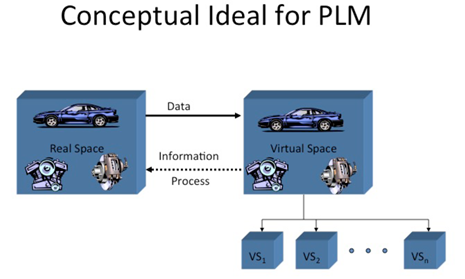
Digital Twin -konsepti (Michael Grieves)
Esimerkiksi Siemens käyttää seuraavaa määritelmää: ”Digitaalinen kaksonen on fyysisen tuotteen tai prosessin virtuaalinen esitys, jota käytetään ymmärtämään ja ennustamaan fyysisen vastineen suorituskykyominaisuuksia. Digitaalisia kaksosia käytetään tuotteen koko elinkaaren ajan tuotteen ja tuotantojärjestelmän simulointiin, ennustamiseen ja optimointiin ennen fyysisiin prototyyppeihin ja omaisuuteen sijoittamista.”
Näin tehtiin aito Digital Twin, case Mevea
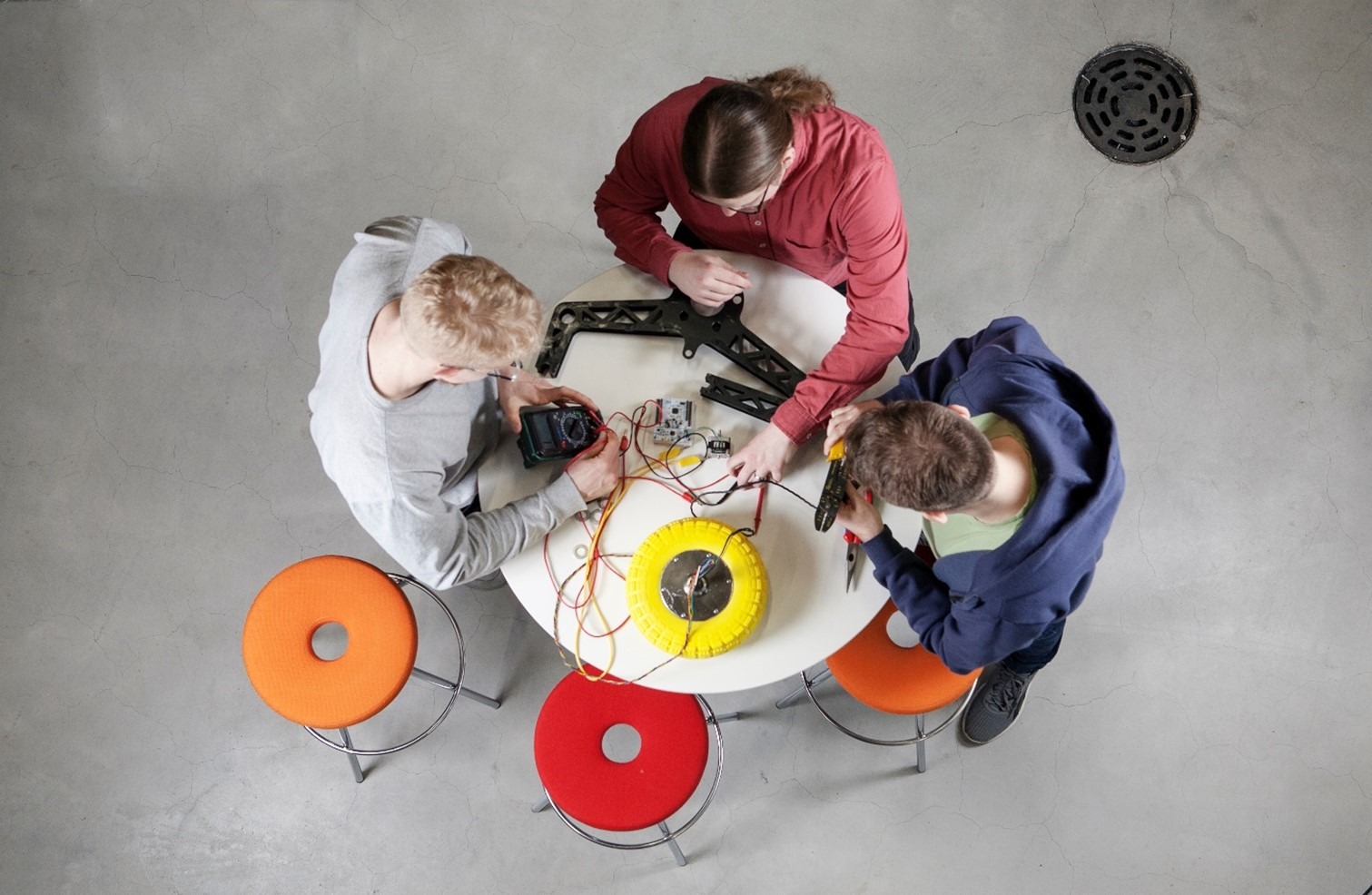
Digitaalisen kaksosen tekemistä päästiin kokeilemaan käytännössä projektissa Mevean kanssa. Mevea Oy on suomalainen simulointiohjelmia ja -tuotteita tarjoava yritys. Yrityksen päätuotteina ovat koulutus- ja tuotekehityssimulaattorit. Mevea järjestää joka vuosi asiakkailleen ison seminaarin. Projektissa oli tavoitteena kehittää autonomisen robotiikan demosovellus Mevean syksyn 2019 asiakasseminaariin.
Mevean simulaattorituotteeseen oli tullut uutena ominaisuutena mahdollisuus hyödyntää Unity-pelisimulaattoria. Metropolialla on ollut testilaitteena Clearpath Jackal ROS-pohjainen autonominen robotti. Näihin pohjautuen tavoitteena oli tehdä Jackal-robottiin pohjautuva demo, jossa hyödynnettäisiin Mevean uusia ominaisuuksia syksyn 2019 asiakaspäiville. Tekijöinä oli kaksi opinnäytetyön työntekijää Koneautomaation pääaineesta, Jaakko Pakarinen ja Jarmo Immonen, sekä kaksi Koneautomaation opettajaa, Antti Liljaniemi ja Heikki Paavilainen.
Jackal- autonomisesta robotista suunniteltiin 3D-malli NX CAD -järjestelmällä. Malliin rakennettiin kinematiikka ja dynamiikka Mevean simulaatio-ohjelmistolla. Demoa varten rakennettiin 4 x 4 metrin demoareena. Areenasta tehtiin 3D-pelimaailma Unity-ohjelmistoon. Jackalin 2D laserskannerit (LiDAR) ja muut sensorit mallinnettiin virtuaalisina Unity/Mevea -ympäristöön.
Robotin Digital Twin seuraa oikean laitteiston liikettä ja anturointeja. Robotin Digital Twinistä voidaan ohjata robottia. Kehitettyä ominaisuutta voidaan hyödyntää esimerkiksi autonomisen robotin ohjausjärjestelmän kehitystyössä.
Demo rakennettiin onnistuneesti ja robotista saatiin tehtyä digitaalinen kaksonen. Samalla Mevean ohjelmistoon työstettiin yhteistyönä uusi ominaisuus. Näin robotista rakennettiin virtuaalinen kinematiikka- ja dynamiikkamalli, jossa myös sen toimintaympäristö mallinnettiin.
Robotiikan tehokas kehittäminen vaatii tuekseen Digital Twin -teknologiaa, jotta robottien ohjelmointi ja kehittäminen on mahdollista ilman fyysisiä laitteita. Yhteistyötä Mevean kanssa on tarkoitus jatkaa muun muassa ambulanssisimulaattooriprojektissa, jossa on tarkoitus mallintaa osa Helsinkiä ajoympäristöksi ja käyttää simulaattoria Ensihoidon koulutusohjelman opetusympäristönä. Olisi myös mielenkiintoista tutkia Digital Twin -teknologian hyötyjä oikeissa teollisissa autonomisen robotiikan projekteissa.
Lähteet
[1] M. Grieves, J. Vickers, Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems, Transdisciplinary Perspectives on Complex Systems, 2017, 85–113, DOI: 10.1007/978-3-319-38756-7_4
[2] M. Grieves, Product lifecycle management: the new paradigm for enterprises, International Journal of Product Development, 2(1/2), 71-84, 2005, DOI: 10.1504/IJPD.2005.006669
[3] https://history.nasa.gov/
[4] https://www.plm.automation.siemens.com/global/en/our-story/glossary/digital-twin/24465
[5] https://digisalama.metropolia.fi/
Kirjoittaja: Antti Liljaniemi työskentelee kone- ja autotekniikan lehtorina Metropolia Ammattikorkeakoulussa.
antti.liljaniemi@metropolia.fi
+358 400 240 756
Metropolia University of Applied Sciences
Finland





Kommentit
Ei kommentteja