

Digi-Salama-hankkeessa tehtiin projekteja kahden vuoden ajan vuosina 2019–2021 viiden teknologiateeman alla implementoiden niitä viidelle Vantaan kaupungin kärkiklusterialalle: logistiikka, elintarvikeala, kiertotalous, älytuotanto ja älykiinteistöt. Syntyi 25 salamaprojektia, joista viisi toteutettiin UxV-teknologiateeman alla. Itse toimin kyseisen teknologian teemavastaavana hankkeen aikana. Hanke alkoi syyskuussa 2019, ja saman vuoden kesäkuussa valmistuneena insinöörinä olin vielä hieman vihreä. Tuntui jopa hurjalta hypätä sormia näpäyttämällä pöydän toiselle puolelle opiskelijasta projekteja ohjaavaksi insinööriksi – lähes opettajaksi.
Mikä ihmeen UxV?
Autonomisista robottia tarkoittavassa UxV-termissä U ja V tulevat sanoista Unmanaged Vehicle (ei-ohjattu ajoveuvo). X taas voi tarkoittaa sanoja Air (ilma), Ground (maa), Surface (pinta) tai Under Water (pinnan alainen) sen mukaan, millaisessa ympäristössä laitteen on suunniteltu toimivan. Itse arvelen, että tulevaisuudessa saamme käyttöömme vielä s-kirjaimen tarkoittamaan sanaa Space (avaruus). Ensimmäiset turistit ovat jo käyneet avaruudessa, ja tosissaan myös suunnitellaan siirtokuntaa Marsiin.

Kehityssuunta on mielestäni selvä, eli ihmisiä ja tavaroita on yhä enemmän tarve kuljettaa myös maapallon vetovoiman ulottumattomissa. Toki miehittämättömiä luotaimia on lähetetty tutkimaan maailmankaikkeutta jo 70-luvulla, mutta en kuitenkaan kutsuisi Voyager 1:tä vielä autonomiseksi robotiksi, koska kaikille UxV-laitteille yhteistä on niiden kyky havainnoida ympäristöään sensoreilla, jotka laitteen ohjausjärjestelmään liitettyinä tarjoavat laitteelle riittävästi dataa omatoimiseen päätöksentekoon. Tällaisia sensoreita ovat mm. 2D- ja 3D-laserkeilaimet eli LiDARit konenäkökamerat ja ultraäänianturit. Voyager 1 ei tee autonomisia päätöksiä vaan lähettää ainoastaan keräämänsä dataa takaisin.
UxV-teknologian laitteitta voidaan myös kutsua mobiiliroboteiksi. Onhan ne lähtökohtaisesti suunniteltu liikkumista vaativaan työhön. Täysi potentiaali näistä laitteista lunastetaan, kun ne liitetään osaksi kyberfyysistä järjestelmää (Cyber Physical System, CPS). Mobiilirobotti edustaa järjestelmän fyysistä puolta ja toimii nöyränä palvelijana yrityksen tuotannon- ja toiminnanohjausjärjestelmille (MES ja ERP), jotka edustavat kyberpuolta. Robotti siis saa automaattisesti näiltä taustajärjestelmiltä tehtävänsä, joka voi esimerkiksi olla komponenttien haku varastosta ja toimitus tuotantosolulle. Robotti saa siis taustajärjestelmästä käskyn hakea paikasta A komponentteja ja toimittaa ne paikkaan B. Kuinka näiden pisteiden välinen matka kuljetaan, jää robotin itse pääteltäväksi annettujen reunaehtojen rajoissa. Ehtoja voi olla aina nopeusrajoituksista yksisuuntaisiin kaistoihin ja tietyllä alueella liikkuessa kuulutettavaan äänimerkkiin.
Alkuvaiheessa hanketta teknologiateeman nimitys oli vain UGV-tekniikka, sillä alun perin arvelimme projektien keskittyvän vain maan päällä kulkeviin laitteisiin.Tämän oletuksen ja teknologiakartoituksen pohjalta hankittiin MiR100-mobiilirobotti ja toteutettiin sillä pienimuotoinen testiprojekti. Testiprojektissa opiskelijaryhmä suoritti robotille käyttöönoton ja rakensi Myyrmäen kampuksen liikuntasaliin pujotteluradan, josta robotin tuli selviytyä – ja hienosti selvisikin!
Yritysverkot vesille ja varsinaiset projektit käyntiin
Seuraavassa vaiheessa alettiin etsiä potentiaalisia asiakasyrityksiä soveltamaan uutta teknologiaa toiminnassaan. EKR (ennen koronaa) näitä löytyi myös meikäläisen jalkatyönä messuilta ja konferensseista, mutta myöhemmässä vaiheessa enemmänkin kokeneempien kollegoiden lokeroilla. Viidelle rohkealle ja innokkaalle asiakkaalle lopulta pääsimme uutta osaamista ja teknologiaa soveltamaan. Tässä käydään nämä projektit vain lyhyesti läpi, mutta seuraavissa kahdessa blogitekstissä, jotka on jaettu UGV- ja UAV-postauksiksi, projektien kulkuun ja tuloksiin pureudutaan tarkemmin sekä käydään hankkeen virallisia tulosindikaattoreita läpi projektikohtaisesti.
Refair Oy: automaattinen noutovarasto
Ensimmäisenä varsinaisena UxV-asiakasprojektina lähdettiin kehittämään automaattisen noutovaraston konseptia Refair Oy:lle. Yritys on kylmä-, ilmastointi- ja lämpöpumpputekniikan maahantuonti- ja tukkuliike. Yrityksellä on monia asiakkaita, joilla saattaa olla tarve saada huoltokeikalle komponentti keskellä yötä. Automaattisella noutovarastolla pyrittiin vastaamaan tähän tarpeeseen. Muutaman erilaisen konseptiehdotuksen pohjalta päätettiin lähteä näistä yhtä jatkokehittämään ja lopulta myös toteuttamaan: ratkaisussa mobiilirobotti MiR100 hakee varsinaisen varaston puolelta kokonaisen varastohyllyn, ajaa RFID-porteista läpi noutotilaan, asiakas kerää hyllystä tarvitsemansa, robotti ajaa uudestaan porteista läpi ja RFID-tunnisteella merkityt tuotteet on luettu molemmilla läpimenokerroilla. Erotuksesta järjestelmä päättelee, mitkä tuotteet asiakas on poiminut ja lähettää laskun.
Loval Oy: sisälogistiikan automatisointi mobiilirobotiikalla
UGV-tekniikkaa hyödynnettiin myös Loval Oyn tarpeista lähteneessä projektissa, jossa MiR100 näytteli jälleen pääosaa kuten Refairillakin. Loval Oy on lämmityskomponenttien valmistaja Loviisasta. Yritys on yksi Euroopan johtavista putkivastusten, lämmityselementtien ja -ratkaisujen valmistajista. Yrityksen varasto- ja tuotantotilojen suuret etäisyydet ja massiivinen tuotantoliikenne toimivat määrittävinä tekijöinä projektin aihetta ja tavoitteita määriteltäessä. Aiheeksi muodostui sisälogistiikan automatisointi mobiilirobotiikalla. Projektin aikana MiR100 testattiin ja demottiin Lovalin tuotantotiloissa Loviisassa kolmen viikon ajan ja testijakson perusteella pystyttiin todeta teknologiasta olevan hyötyä yritykselle. Demon perusteella pystyttiin myös toteamaan, ettei yksi robotti riitä kokonaisvaltaiseen ratkaisuun. Demossa robotti kuljetti autonomisesti komponentteja varastosta tuotantosolulle.
Mevea Oy: törmäyssimulaattori
Mevea on simulaatioteknologiayritys, jonka toiminnan keskiössä ovat liikkuvien koneiden fysiikkaan perustuvat digitaaliset kaksoset. Yritys on kehittänyt ohjelmiston, jolla voidaan simuloida muun muassa ajoneuvojen käyttäytymistä eri tilanteissa ja saada hyvin tarkkaa dataa aivan komponenttitasolta asti. Projektin aiheeksi valikoitui törmäyssimulaattorin kehittäminen ajoneuvoille sekä työkalu ajoneuvon osien hallitsemiseen ja tarkasteluun. Projektin aihe osoittautui ennakoitua haastavammaksi, eikä tavoitteisiin aivan päästy. Lopputuloksena syntyi kuitenkin työkalu, jossa on haluttuja ominaisuuksia, mutta ei tarpeeksi pitkälle kehitettynä. Jäi lopulta yrityksen itse päätettäväksi, kannattaako simulaattoria ja työkalua kehittää eteenpäin.
Aiforsite: rakennustyömaan etävalvonta ja kuvaaminen droonilla
Aiforsite on ohjelmistoyritys, jonka tuotteella voidaan rakentaa hyvin pitkälle kehittynyt rakennuksen tietomalli BIM (Buildin Information Model). Yrityksen nykyisessä järjestelmässä rakennustyömaata kuvataan droonien avulla ulkopuolelta. Sama ratkaisu oli tarkoitus laajentaa toimimaan myös sisätiloissa. Projektin aiheeksi muodostui droonin lennättäminen etäyhteydellä sekä autonomisen sisälentäminen. Etäyhteydellä lentämisestä valmistui toimiva demo, mutta autonominen sisälentäminen osoittautui vielä liian haastavaksi toteuttaa käytössä olleiden droonien suljetuista ohjelmointirajapinnoista.


Insta Group + Ilmatieteenlaitos
Insta Group Oy on suomalainen perheyritys, jonka toimialoja ovat teollisuusautomaatio, digitaalinen tietoturva ja puolustusteknologia. Yrityksellä on vankkaa osaamista UAV-teknologiasta, ja yritys on tuottanut drooneja sekä droonipalveluita Puolustusvoimille. Instan mielenkiinto kohdistui ilmiöön, jossa kylmissä olosuhteissa propelleihin kertyy jäätä. Ilmiötä kutsutaan jäätämiseksi, ja sillä on vaikutusta drroonin lentokykyyn. Kuinka paljon vaikutusta on ja kuinka jäätäminen voidaan havaita, määrittyivät Instan puolesta projektin tavoitteiksi.
Projektissa kolmantena osapuolena toimi Ilmatieteen laitos, joka tuottaa sääpalveluita sekä toimii tutkimuslaitoksena. Tällaisia palveluita ovat muun muassa sääennusteet ja sään lentokelpoisuus tiedot. Projektin tavoitteeksi muodostui parantaa näitä palveluita droonien telemetria- ja anturitiedoista mitattavasta säädatasta.
Instan tavoitteiden osalta projekti valitettavasti jäi vajaaksi, koska jäätämistä ei päästy tutkimaan käytännön testeillä ja työ jäi teoriatason selvitykseksi. Projektia on tosin tarkoitus jatkaa myöhemmässä vaiheessa uuden hankkeen osana. IL:n osalta tavoitteisiin päästiin oikein hyvin ja idean toimivuus pystyttiin todentamaan.
Raaka vai kypsä?
Projektien pohjalta voidaan todeta UxV-teknologian olevan hyvinkin kypsää teollisuuden tarpeisiin. Etenkin juuri teollisuuden tarpeisin kehitetyt UGV-laitteet, kuten MiR100, osoittivat olevansa täysiverisiä ammattilaisia teollisuus 4.0-tuotantomaailmassa. Tosin kuluttajille suunnatut keskihintatason UAV-laitteet osoittivat olevansa vielä hieman raakoja ollakseen muokattavissa pienellä vaivalla teollisuuden tarpeisiin autonomisiksi työmyyriksi – etenkin jos olosuhteet ovat yhtään haastavampia esimerkiksi valaistuksen ja tilojen ahtauden suhteen. Itse kasaamamme drooni antoi paljon suurempia lupauksia täysin autonomisesta lentämisestä sen kokonaan avoimien ohjelmointirajapintojen johdosta. Kuluttajille suunnatuissa valmiissa drooneissa ohjelmointirajapinnat eivät ole ilman ohjelmiston kehityspakettia eli SDK:ta (Software Development Kit) juuri lainkaan auki eikä SDK:llakaan päästy riittävään avoimuuteen. Kun koneoppimis- ja konenäköalgoritmit kehittyvät ja tulevat kevyemmiksi droonin kyytiin mahtuvien mikrokontrollereiden suorittaa, saa täysin autonominen lentäminen huomattavaa lisänostetta.
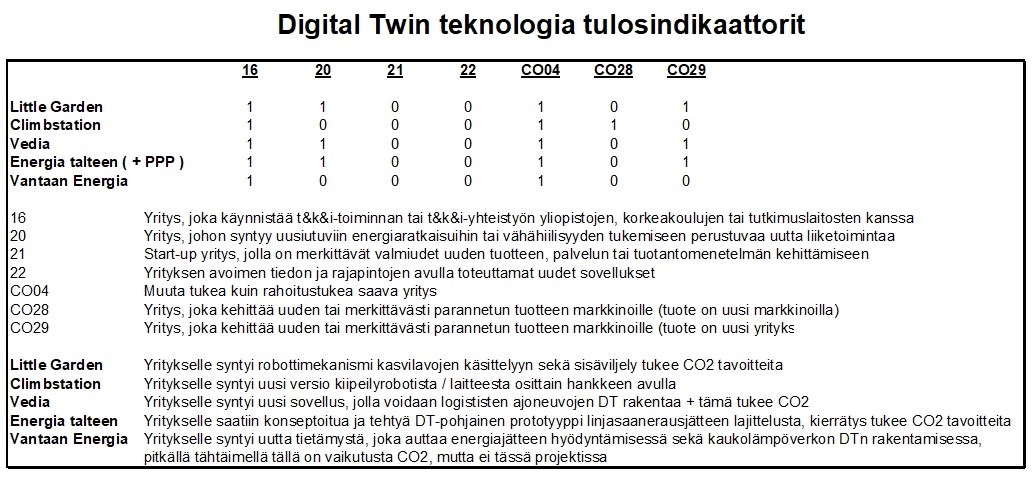
Hankkeen virallisten tulosindikaattorien perusteella voidaan todeta kahdessa projektissa syntyneen uusiutuviin energiaratkaisuihin tai vähähiilisyyteen perustuvaa uutta liiketoimintaa. Kahdessa projektissa myös toteutettiin avoimien rajapintojen kautta uudet sovellukset. Yhdessä projektissa saatiin kehitettyä uusi tai merkittävästi parannettu tuote markkinoille ja toisessa uusi tai merkittävästi parannettu tuote yritykselle.
Lähteet:
- ja 2. Pexels.com
Kirjoittaja:
Lauri Ristolainen
Konetekniikan insinööri, pääaineena automaatio
Digi-Salama-hankkeen projekti-insinööri





Kommentit
Ei kommentteja