Accelerating the evolution of mobility in the Baltic Sea Region with robot bus pilots

6.1.2022
Tikissä
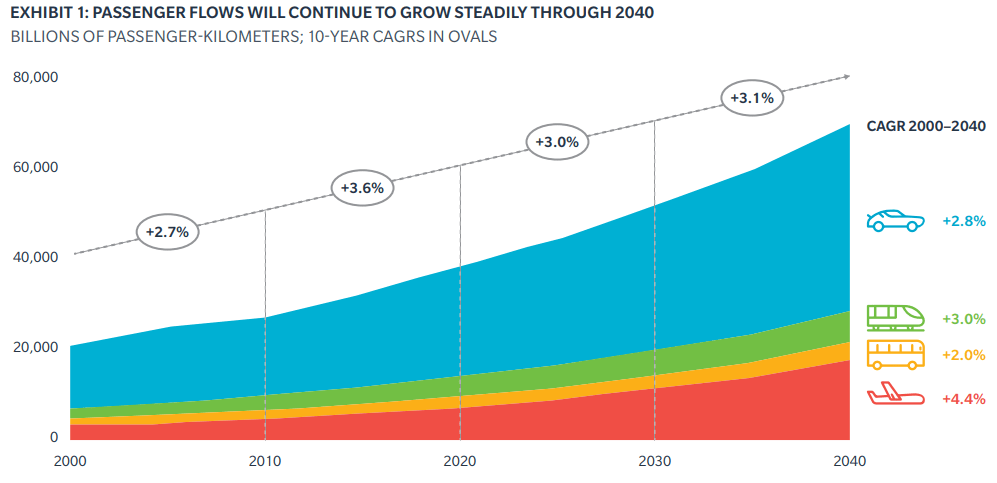
Currently, public transport is funded by subsidies and rarely offers competitive options to private cars. The lack of flexible on-demand type of service and the gap in the last mile connectivity becomes a barrier to use public transport in many European cities. There are needs to promote the usage and support the change in the field of urban public transportation. The positive change can be achieved through implementation of automated, driverless electric shuttles in the public transport chain, especially for the first or last mile mobility needs.
Providing improved public transport services are expensive with today’s production method, as the driver represents up 60% of the costs. Operation of vehicles without a driver in the bus will therefore represent a game changer for public transport and transport operators. Up until 2019 there have been around a hundred autonomous shuttle pilots across Europe. They have typically been financially supported by EU-funding instruments. After dozens of similar pilots, committing resources to organize another pilot of an autonomous bus with an operator on board is no longer innovative and does not bring surprising new conclusions.
In this blog post we describe the main lessons learned from three robot bus pilot sites, where main goal was to operate automated shuttles without safety operators on board.
Long-term collaboration supports advanced piloting goals
The level of maturity in autonomous driving technology is the key element to successful operating. The first pilots have been operated with a safety driver on board so human could take over and drive the autonomous vehicle manually, if the computer programmed commands were not valid in the physical operating environment.
In 2021, the Sohjoa Last Mile project coordinated by Metropolia University of Applied Sciences (Finland) deployed three robot bus pilots, in Kongsberg (Norway), Tallinn (Estonia) and Gdansk (Poland). These pilot cities had participated in the Sohjoa Baltic project in 2017-2020. The previous collaboration helped to build trust between partners, allowing the new project to start immediately. The aim was to study the autonomous driving without operator on board and provide information for the future remote fleet operating.
Deploying a robot bus pilot requires detailed planning from route selection to vehicle provider, administration of permits, test-plates, insurances and organizing suitable infrastructures. For usability of the pilot, the route choices of pilot sites aimed to serve the daily commuters and attract passengers. Pilots should not disturb the regular public transport routes, other road users or residents.
As the experience, resources and local circumstances of the three sites are very different, the pilots also differed considerably:
In Gdansk, the route was based on public’s opinion poll results, where a significant number of responders indicated that the good area of operation would be cemeteries, the largest one was chosen as a pilot site. The cemetery covers an area of more than 50 hectares and the demonstration route has been marked out along a section connecting the two main entrances with a length of about 1100 m.
In Kongsberg, the main priority in deciding on a route was its usefulness, both with respect to testing the technology and mobility solution for daily users. Vehicle provider’s main concern was safety. As operations without an operator on-board were still rather new at the time, the choice was restricted to closed areas with controlled access, outside the public road network. The only feasible option, the Kongsberg Technology Park, was chosen.
In Tallinn, from the very beginning, in this extension stage project the TalTech University intended to run a pilot on a campus road, that had been used for previous autonomous shuttle pilots and therefore no separate permit was needed. Route had been approved by the road administration back in 2018. The demonstration route was half a kilometre long and led through the campus to the park.
Fragile network connections may hinder the remote teleoperating
The remote fleet teleoperating require technical equipment for the operator to use in a control center. These include computers, monitors and a steering mechanism. The equipment must match the vehicle’s software. Additionally, it is crucial to transmit data via 4G/5G connection with low latency and sufficient bandwidth.
The 5G has been publicly launched to offer high speeds and low latency. In Tallinn, TalTech tested 5G for controlling the bus and measured the speeds and latency in 11 different points. The university could then compare it to 4G in the same points. The results of network measurements showed that
5G coverage was several times better on the actual route of the robot bus than it is on the service road.
This deviation in 5G speeds in directly relation to the physical geometry of the operational area can be mitigated by tactically placing 5G masts to improve coverage along the route.
Throughout the pilot experience in Tallinn there was not indicated the need for 5G due to insufficient 4G speeds
4G was more stable than 5G
In conclusion to network speed measurements, unless the aim is specifically to test 5G, TalTech suggests using 4G in similar operations.
Video stream from the autonomous vehicle is a stress test
Stable internet connections were required to transmit data between the autonomous vehicle (AV) and the control center in Kongsberg. In the pilot operations, internet connections provided both the camera feeds and the remote-controlled functions, meaning the supervisor stopping the AV from the control center.
When setting up the control center, the network connection was provided initially was 5G. However, the EasyMile vehicle used at this site requires a different set up in order to stream the videos correctly. Streaming camera feeds from three cameras, as well as a high-resolution location map results in significant data volumes transfers. If the type of setup used was to be scaled to a fleet of vehicles, a supervisor following camera feeds from all vehicles would not only lead to cognitive overload, but also rapidly become technologically infeasible due to limited bandwidth. However, it is to be expected that as the technology matures and trust is built, the supervisor will not have to continuously watch a camera feed but only switch on the cameras when the AV requires it.
At no point did the 5G functionality or any other network related feature led to any downtime of the AV. However, it was found that the cameras on the AV were not suitable for providing enough information to the supervisor in all conditions. Additionally, it was found that the built-in cameras were not able to cope with more challenging light conditions.
Temporary infrastructure for a short term pilot is not feasible
The city of Gdansk decided to contract an external company to carry out the entire piloting of the autonomous bus. It was up to the contractor to fulfill all the conditions necessary for autonomous driving to be carried out by remote supervision and remote control of the vehicle.
“…I believe it might be controversial choice of a pilot at cemetery […] However, the feedback we are getting here from passengers is that, please, keep it for a longer term. Keep it forever.” Magdalena Szymańska, project manager, City of Gdansk
Potential contractors asked whether the city would provide a 5G network. There is not public network at the cemetery. As the 5G network will be important for commercial deployments of autonomous vehicles, the 4G network will be sufficient provided that certain conditions are met. These include a stable connection ensured throughout the area with a transmission speed (sending data) of not less than 10 megabits per second. At the cemetery, there was a significant decrease in the speed and quality of internet connectivity at peak times around the cemetery due to increased number of vehicles around. The decrease was also experienced at weekends when there was an increase in the number of visitors. The actual connection speed at the cemetery often dropped to half or less, sometimes to a complete lack of connectivity.
As it turned out during the pilot, providing adequate infrastructure requires time minimum of two to three months. This process consists of
an initial survey of network coverage
design of a solution for the area
implementation.
When bandwidth was reduced, the vehicle operator monitoring the vehicle from the remote-control center was not able to fully assess the situation around the vehicle due to the significant delay and poor quality of the camera image transmission. In moments of fading, he lost communication with the vehicle, which made it impossible to react and make decisions.
During the pilot, the 3G/4G LTE networks of the four largest available operators in Poland were used, however, none of them allowed to achieve appropriate transmission quality at all times. Some of them did not even cover the entire route.
Developing the language of driving
For a human driver, other road users can see their body language and gestures if necessary, but if there is no driver on board, other road users may get confused. There are not coined yet specific global standards for the human- or computer-driven, electric vehicles to indicate their intentions in mixed traffic.
“[…]I think people don’t usually watch inside the buses if there is anybody or not, but when they do notice that there is nobody, it gets a lot of attention and they start worrying about where does it go and how does it go.” Krister Kalda, project manager, TalTech
The project in Tallinn allowed Iseauto to test their own language of driving, where the vehicle can illuminate different signalling patterns to pedestrians. A red blinking cross pattern is used when this particular vehicle starts to perform an emergency braking caused by a person unexpectedly appearing on the road. It is intended to alert people in dangerous situations.
Additionally, auditory guidance was featured in Iseauto vehicles to guide other road users and pedestrians.
Piloting is a necessary test phase for all cities transitioning to autonomous services
For all three Sohjoa Last Mile piloting sites, the launch of the pilot without an operator on board represented significant progress and provided valuable experience and data to be used in future projects.
Each pilot had unique features. How they are valued, varies per case:
Gdansk is a city located in northern Poland, covering the area of 262 km2 with over 471,5 thousand residents and over 177,7 millions of public transport passengers per year. The municipality for the second time in a row proved to be the only actor nationwide to organise an autonomous bus pilot and probably the first worldwide to run it at the cemetery and delivered valuable experience for future procurements and implementations.
Kongsberg municipality is located in Buskerud region and within Viken County in Norway with population of over 27 000 residents. For the first time in Norway, the driverless operation was tested and what is more, the driverless phase included on-demand transport, to eliminate empty trips and pointless energy consumption.
Tallinn is the capital and largest city of Estonia, with an area of 159.2 km² and nearly 438,000 inhabitants. Taltech managed to execute driverless operation from day one, and to maximise in-house resources. However, the teleoperation software was outsourced, the local remote-control centre at the campus worked simultaneously to the one in Riga, in order to build competence at the University. What is even more interesting, certain signs for future language of driving were developed.
How to pilot autonomous shuttles successfully?
The pace of transformation towards autonomous mobility and public transport differs per country, hence the regulatory changes as well as further investments in piloting, technology research and infrastructure are necessary. This requires continuous collaboration over the national boarders. Here are five points to take into consideration:
Make a solid setup plan. Testing an autonomous vehicle (AV) require always the test-permit-application processes, logistics and different types of administrative steps. A pilot route and vehicle provider must be selected. Especially when piloting without an operator on-board in remote controlled mode, there are no turnkey solutions available yet.
Develop broad local collaboration for support. In Norway, Kongsberg Municipality outsourced practicalities to Applied Autonomy and collaborated with the Norwegian Public Roads Administration (NPRA), Viken County, the regional public transport company Brakar, and their transport provider Vy, as well as EasyMile, the supplier of autonomous vehicles. In this case, NPRA and Brakar contributed financially to the project, with a view towards learning about the technology and processes.
Cooperate with interdisciplinary mindset. In Estonia, the project brought together three different units in Tallinn University of Technology (TalTech): the School of Engineering, the School of Business and Governance and the Smart City Center of Excellence. All units had their specific focal points, and the interdisciplinary approach allowed to study more closely both the technical requirements and challenges related to fully autonomous driving, and the societal context and focus on challenges for cities and users. Throughout the project, TalTech was supported by the authorities and Tallinn Transport Department.
Allow knowledge-sharing across organisational and national boarders. Kongsberg Municipality and TalTech had previous experience in pilot implementation on a larger scale and in varying weather conditions as well as in-house resources in the form of an autonomous electric bus. In contrast, the City of Gdansk had previously implemented a small scale pilot, again had the opportunity to learn from more experienced partners.
Commit to long-term development work from pilots to regular services. Without a plan for transition, no city jumps from one small scale pilot instantly to a permanent regular autonomous shuttle bus solution. The persistent work with the local ecosystem actors has resulted in Kongsberg as the bus route number 450, the autonomous bus service seeded from the Sohjoa Baltic project.
The supportive regulatory changes regarding the EU-level legal framework and national regulations on deployment and development of autonomous public transport services are required as well. To meet public needs for transport, the service must to perform as well or even better than regular buses.
In the end, pilots are deployed to support the development of cities’ public transport services. They are designed to test and collect hard data, but also to serve and search feedback from the service users. Communicating openly and encouraging the public to get onboard and test-drive the robot bus is a way to raise awareness of the future of mobility. Without users, there is no need for services.
Authors
Azat Kuitunen is automotive engineer who has worked as project manager for Sohjoa Baltic and Sohjoa Last Mile projects at Metropolia University of Applied Sciences' Smart Mobility Innovation Hub.
Milla Åman Kyyrö is communications specialist at Metropolia University of Applied Sciences and Communication Manager of Sohjoa Baltic and Sohjoa Last Mile projects, coordinated by Metropolia's Smart Mobility Innovation Hub.
The authors with project management role have planned and deployed the local robot bus pilots of Sohjoa Baltic and Sohjoa Last Mile:
Magdalena Szymańska, project manager, City of Gdansk
Krister Kalda, project manager, Tallinn University of Technology, TalTech
Jaanus Müür, project manager, Tallinn University of Technology, TalTech
Rebecca Ronke, implementation manager, Applied Autonomy
Read more
The original blog post: Accelerating evolution of mobility in the Baltic Sea Region - Sohjoa Last Mile's robot bus pilot experiences, on Sohjoa Last Mile project webpage.
Transport emission reduction goals in the light of energy consumption and charging of robot buses by Eetu Rutanen, on Tikissä
Uutiset ovat suodatettua tietoa

18.11.2021
Tikissä
Ammattikorkeakoulujen tutkimus-, kehittämis- ja innovaatiohankkeiden piirissä toteutetaan usein käytännönläheisiä kokeiluja. Niiden tarkoituksena on todentaa, miten jokin uusi asia toimii käytännössä. Kyseessä voi olla jokin uusi toimintamalli tai fyysinen tuote, jota halutaan testata aidossa käyttöympäristössä. Testaaminen tuottaa tärkeää tietoa näiden toimintamallien tai tuotteiden kehittäjille ja on siten arvokasta työtä.
Hankkeiden työn tuloksille halutaan myös laajempaa näkyvyyttä. Yleensä koetaan myönteiseksi, jos uutismediat kiinnostuvat kokeiluista ja niistä saaduista tuloksista. Vakiintuneiden, toimitettujen uutismedioiden tuottamiin uutisiin suhtaudutaan Suomessa yhä melko luottavaisesti. Media tavoittaa laajemmat yleisöt kuin yksittäisen hankkeen viestintäkanavat.
Median kiinnostuksen kääntöpuolena on riski siitä, että hanketyö saa jostain syystä kielteistä julkisuutta. Kyse voi olla vaikkapa väärän tiedon leviämisestä, misinformaatiosta. Media toimii kilpaillussa ympäristössä, jossa kaikki reagoivat nopeasti uutiskynnyksen ylittäviin tapahtumiin. Huomioarvoa mitataan otsikoiden klikkauksien määrissä. Suosituimmat uutiset myös saavat nopeasti laajempaa näkyvyyttä lukijoiden linkkijakoina. Väärän tiedon levittyä, sen korjaaminen on hankalaa.
Kaikki tieto ei mahdu uutisiin
Hankkeissa toimivien vastuulla on tarjota medialle ja muille yleisölle parasta mahdollista saatavilla olevaa tietoa. Uutismedioissa työskennellään aikapaineen alla. Päivittäisuutiset eivät aina taustoita tapahtumia tai ilmiöitä kovinkaan laajasti. Hanketoimijoiden on hyväksyttävä, että hanke voidaan saada näkyviin mediassa, muttei välttämättä juuri siitä näkökulmasta, kuin olisi toivottu.
Kaikki oleelliset näkökulmat ja havainnot eivät tosin mahdu hankkeissakaan toteutetun viestinnän sisältöihin. Hankkeiden omassa uutisoinnissakin tehdään valintoja ja linjauksia:
hankkeiden sosiaalisen median päivityksissä, rapoteissa ja tiedotteissa tiivistetään pitkällä aikajänteellä kertynyttä tietosisältöä.
tuloksista viestiminen vaatii usein tiedon yleistajuistamista kohdeyleisölle sopivalla tavalla.
Selkeä viestintä vaatii kiteyttämisen taitoa, mutta liiallista yksinkertaistamista tulee välttää. Hankkeiden tiedotustyössä on hyvä olla mukana aihealueeseen syventynyt viestijä, joka kykenee taustoittamaan asioita ymmärrettävästi niin journalisteille kuin suurelle yleisölle.
Kriisitilanne vaatii nopeaa reagointia
Omassa työssäni olen toiminut monien robottibussikokeilujen viestinnästä vastaavana asiantuntijana. Kirjoitin heinäkuussa 2020 Tikissä-blogiin hankkeiden kriisiviestinnän ennakoivasta suunnittelusta. Marraskuussa 2021 kohdattiin päivä, jota kukaan robottibussihankkeissa toimiva ei halua kohdata: peltikolari. Robottibussikolarissa oli kyse turvakuljettajana toimineen ihmisen tekemästä inhimillisestä virheestä manuaaliajossa, kuten Helsingin Sanomat uutisoi.
Robotti ei ollut kolariin syyllinen. Kun ensimmäinen versio uutisista ilmestyi verkkolehtiin, korvaamaton vahinko robottibussien maineelle oli lähellä. Juttujen otsikoissa mainittiin vain robottibussin kolaroineen. Täsmentävää tietoa ihmiskuskin roolista vahingon aiheuttajana ei mainittu. Luonnollisesti monet lukijat, mediaan luottaen, ottivat jutun totena. Uutisten lukijakommenteissa irvileuat ilakoivat.
Tällaisessa tilanteessa on syytä saattaa toimittajat nopeasti ajan tasalle vahingon syistä ja vaatia oikaisua juttuun. Näin toimittiin nytkin ja saman iltapäivän aikana alkuperäisten uutisjuttujen otsikoita päivitettiin. Tämän jälkeen uutisen suosio hiipuikin.
Esimerkissä mainittu kolari olisi todennäköisesti voitu välttää, mikäli ajoneuvo olisi kulkenut automaattiajossa. Robotti olisi tehnyt äkkipysäytyksen havaitessaan törmäysriskin. Tätä näkökulmaa ei oikaistuissa uutisjutuissa tuoda esiin. Eikä oikaistu juttuversio välttämättä tavoita koko yleisöä. Emme voi lopulta mitenkään olla täysin varmoja, kuinka monelle robottibussin kolarointiuutisen lukeneelle on jäänyt vääristynyt mielikuva robottibussien turvallisuudesta.
Hankkeiden parissa työskentelevien tehtäväksi jää korjata mahdollisia väärinkäsityksiä ja tuoda esiin tosiasiat vielä kriisitilanteen lauettuakin.
Hankkeiden välisellä viestintäyhteistyöllä kohti laajempaa vaikuttavuutta

26.8.2021
Tikissä
Ammattikorkeakoulujen tutkimus-, kehittämis- ja innovaatiotoiminnan (TKI) määrä ja laajuus ovat kasvaneet vuosikymmenessä. Näin kasvusta kerrotaan ammattikorkeakoulujen rehtorineuvosto Arenen Vaikuttava ammattikorkeakoulu – TKI-toiminta ammattikorkeakouluissa 2021-raportissa;
Vuonna 2015 ulkoisen rahoituksen osuus ammattikorkeakoulujen koko liikevaihdosta oli 7 prosenttia, mutta vuoteen 2020 mennessä osuus oli noussut 12 prosenttiin.
TKI-henkilöstön osuus ammattikorkeakoulujen koko henkilöstöstä on kasvanut vuodesta 2015 lähtien tasaisesti, reilusta 9 prosentista yli 15 prosenttiin koko henkilöstöstä. TKI-työn määrä on edelleen suhteellisen matala suhteutettuna vastaaviin kansainvälisiin korkeakouluihin.
Suurin osa TKI-rahoituksesta tulee julkisista rahoituslähteistä, kuten Euroopan unionilta, Suomen valtiolta tai kunnilta. Hankkeilla kehitetään suomalaista työelämää ja yhteiskuntaa.
TKI-hanketoiminnan laajentuessa halutaan myös kasvattaa toiminnan näkyvyyttä. Viestintä on vaikuttavuuden kannalta kriittisessä asemassa. TKI-toiminnan tueksi tarvitaan viestintää, joka auttaa pyrkimyksissä saada lisää mediaosumia, asiantuntijahaastatteluja ja suosiota sosiaalisessa mediassa. Viestinnän suunnitteluun ja toteuttamiseen eri hankkeita toteuttavat sisältöasiantuntijat usein tarvitsevat viestinnän asiantuntijan apua.
Tällä hetkellä ammattikorkeakoulujen TKI-toiminnan ja siihen kuuluvien hankkeiden viestinnän vastuut on järjestetty monin eri tavoin. Ammattikorkeakoulujen viestintäyksikköjen resurssit eivät riitä yksittäisten hankkeiden viestintätoimenpiteiden tueksi, vaan hankkeen viestintä on ensisijaisesti hankerahoituksella suoritettavaa työtä.
Tässä blogimerkinnässä kerromme Metropolia ammattikorkeakoulun älykkään liikkumisen innovaatiokeskittymän hankeviestinnän toimintamallista, joka on kehittynyt viimeisen viiden vuoden ajan.
Yleisöä kiinnostaa ensisijaisesti, mitä hyötyä hankkeesta on
Metropolia Ammattikorkeakoulu käynnisti ensimmäisenä Suomessa autonomisen sähköbussin pilotoinnin vuonna 2015. Robottibussipilotteja toteutetaan yhä vuonna 2021. Helsingin julkisilla kaduilla ajetut robottibussikokeilut ovat olleet innostusta herättänyttä ja näkyvää hanketyötä. Ne ovat kiinnostaneet yleisöä ja mediaa aina ulkomaita myöten. Hankerahoituksia on saatu rinnakkaisiin ja peräkkäisiin toteutuksiin eri rahoituslähteistä. Innovaatiokeskittymä tunnetaan tänä päivänä parhaiten robottibussikokeiluista. Se on leima, joka julkisen näkyvyyden kautta on syntynyt.
Eri robottibussihankkeet ovat jakaneet periaatteessa saman yleisön. Sen vuoksi eri hankkeiden välillä on mietitty yhdessä älykkään liikkumisen innovaatiokeskittymän ulkoista viestintää ja sen tehostamista. Yhtenä käytännön ratkaisuna on perustettu kaikille hankkeille yhteisiä, innovaatiokeskittymän toiminnasta kertovia sosiaalisen median tilejä. Näille alustoille ovat voineet julkaista erilaista viestintäaineistoa niin hankkeen projektipäällikkö, innovaatiojohtaja kuin hankeviestijä. Yhteistyöllä on varmistettu, ettei tehdä turhaan päällekkäistä työtä. Yhteisesti päivitettävissä somekanavissa on voitu tulla esiin Metropolian innovaatiokeskittymä edellä. Viesti yleisölle ja medialle on ollut samanhenkinen: me tehtiin tällainen, tervetuloa kokeilemaan!
Yhdessä tehty viestintä voi palvella paremmin aihepiiristä kiinnostunutta yleisöä, jonka ei tarvitse etsiä jokaisen hankkeen omaa viestintäkanavaa saadakseen ajantasaista tietoa. Yhteisviestintä ei koskaan poista vastuuta toteuttaa kunkin yksittäisen hankkeen omaa, hankehakemuksen perusteella suunniteltua ja rahoitettua viestintää. On kuitenkin hyödyksi yhdistää tarvittaessa voimia, sen sijaan että kilpaillaan samoista yleisöistä tai median huomiosta.
Robottibussihankkeilla näkyvyyden saavuttaminen ja viestintä ovat kuitenkin kohtalaisen helppoa. Kyseessä kun on sympaattinen liikenneväline, jonka kyytiin voi astua tai jonka voi nähdä ajavan kadulla. Viestintäosaaminen punnitaan, kun pitäisi kertoa teknologiasta, jonka käytännön sovellutukset eivät ole käsin kosketeltavissa. Esimerkiksi, kun tehtävänä on saada media ja yleisö innostumaan 5G-verkon kehittämisprojektista, jossa ainoa näkyvä asia on harmaa laatikko katseilta suojatussa tilassa.
Hankerahoitus ohjaa yhä silpputyöhön
Hankeviestinnän kannalta hedelmällisintä on, jos viestinnän asiantuntija saa syventyä hankkeen teema-alueeseen työskennellen yhdessä sisältöasiantuntijoiden kanssa. Näin ymmärrys aihepiiristä ja sidosryhmistä kasvaa. Tiettyyn teemaan keskittyvä viestinnän asiantuntija toimii parhaimmillaan hankkeiden viestinnän tarpeita ennakoivana, koordinoivana ja kokoavana tekijänä.
Metropolian älykkään liikkumisen TKI-hankkeissa on vakituisia projektipäälliköitä, mutta muu henkilöstö rekrytoidaan tyypillisesti määräaikaisiin työsuhteisiin. Hankkeiden viestinnästä vastaavaksi on rekrytoitu talon sisältä jo vakituisessa työsuhteessa oleva viestinnän asiantuntija. Tämä on ollut mahdollista erityisesti, koska
hankkeiden rahoitushakemuksissa viestintäasiantuntijan rooliin on anottu ja myönnetty rahoitusta
hankkeiden projektipäälliköt ovat nähneet ratkaisun järkeväksi
viestinnän asiantuntija on kokenut työnkuvan mielekkääksi
ratkaisulla on ollut johdon tuki.
Määräaikaisen ja vakituisen työntekijän hanketyöhön palkkaamisen riskit ovat erilaiset. Viestintäasiantuntijaresurssin jakamisen onnistuminen on luonnollisesti kiinni hankkeiden toteutusjaksoista, rahoituskausista ja hakemusten läpimenosta. Rahoitusehtojen mukaisesti kaikki hankkeille tehtävä työ kirjataan tarkasti, jotta nähdään esimerkiksi viestintäasiantuntijan käyttämän työajan kohdentuneen rahoitettuun hankkeeseen.
Monelle organisaatiolle haastavin tilanne on se, että hankkeista maksettava viestintäasiantuntijan työaikaosuus ei kata täyttä työaikaa. Metropolian esimerkkitapauksessa osa henkilötyöajasta onkin käytetty muuhun TKI-toimintaan kytkeytyvään viestintätyöhön, joka on kustannettu ammattikorkeakoulun tukipalveluna. Toisin kuin hankekaudelle palkatun määräaikaisen työntekijän osalta, vakituisen viestintäasiantuntijan tietotaito ei katoa hankekausien nivelvaiheissa mihinkään, vaan voidaan aktivoida uudelleen alkavien hankkeiden käynnistyessä. Tämä vaatii luonnollisesti työntekijältä valmiuksia joustaa omissa työtehtävissä ja toisaalta työnantajalta taloudellista kykyä sitoutua järjestelyyn.
Yhteistyön hyödyt viestinnän kehittämisessä
Robottibussihankkeiden pilottireittien ajamisen aikana on jaettu tietoa robottibussien teknisistä ominaisuuksista ja niiden käyttöönoton reunaehdoista kaikissa mahdollisissa kanavissa. Samoihin yleisön ja median esittämiin peruskysymyksiin on vastattu vuosi toisensa jälkeen.
Muutaman vuoden läheinen yhteistyö teeman parissa auttaa, jos insinööri on estynyt saapumasta robottibussin esittelytilaisuuteen. Viestinnän asiantuntija voi astua esiin luottavaisin mielin ja vastata yleisön kysymyksiin.
Toisin sanoen, kun sama viestinnän asiantuntija toimii useamman älyliikenneteemaisen hankkeen viestinnästä vastaavana TKI-hanketyöntekijänä, hänen on mahdollista oppia uutta, syventää ja laajentaa käsityksiään aiheesta. Hankkeiden edetessä viestijä
oppii sisältöasiantuntijoilta alan näkymistä
omaksuu alan sanastoa
hahmottaa alan verkostoja ja ekosysteemiä
kytkee toiminnan merkityksiä laajemmin yhteiskunnassa tapahtuvaan kehitykseen.
Tietoa omaksuu parhaiten olemalla mukana käytännön hanketyössä ja kohtaamalla ihmiset, niin hankkeen toteuttajat kuin osallistujat. Kehittäjien ja käyttäjien kohtaaminen auttaa viestijää muokkaamaan luontevasti erilaisia sisältöjä eri yleisöille. Samalla on huomioitava, että kiinteässä yhteistyössä hankkeen toteuttajien kanssa toimiva viestijä voi osallistua myös uusien hankkeiden suunnitteluun entistä vankemmalla alan asiantuntemuksella.
Ammattikorkeakoulu on asiantunteva kehittämiskumppani, joka välittää tietoa kokeiluista ja niiden tuloksista verkkoon sekä median edustajille ja sitä kautta suurelle yleisölle. Kun kysymys on uudesta teknologiasta, hankeviestijän on opittava paljon uutta. On ymmärrettävä teknologian murroksen vaikutukset laajemmin kuin yhden hankkeen piirissä ja huolehdittava, että hankkeista ulospäin lähtevä tieto perustuu tosiasioihin eikä yliampuvaan hehkutukseen. Yhteistyössä pohtimalla löytyvät parhaat ratkaisut eri tilanteisiin.
Jos viestinnän rooli hanketoiminnan vaikuttavuuden kasvun tukena arvotetaan riittävän korkealle, on mahdollista resursoida henkilötyövuosia viestintäasiantuntijuuteen yksittäistä hanketta laajemmin. Suosittelemme ottamaan asian harkintaan jokaisessa ammattikorkeakoulussa, jossa on laajemmin eri alojen TKI-hanketoimintaa.
Kirjoittajat
Oscar Nissin on Metropolia Ammattikorkeakoulun älykkään liikkumisen innovaatiokeskittymän innovaatiojohtaja. Tutustu Oscariin tarkemmin Metropolian People Finderissa.
Milla Åman Kyyrö on Metropolia Ammattikorkeakoulun TKI-viestinnän asiantuntija, jonka työpanosta on hyödynnetty älykkään liikkumisen innovaatiokeskittymän robottibussihankkeissa vuodesta 2016 alkaen. Tutustu Millaan tarkemmin Metropolian People Finderissa.









Kommentit
Ei kommentteja