
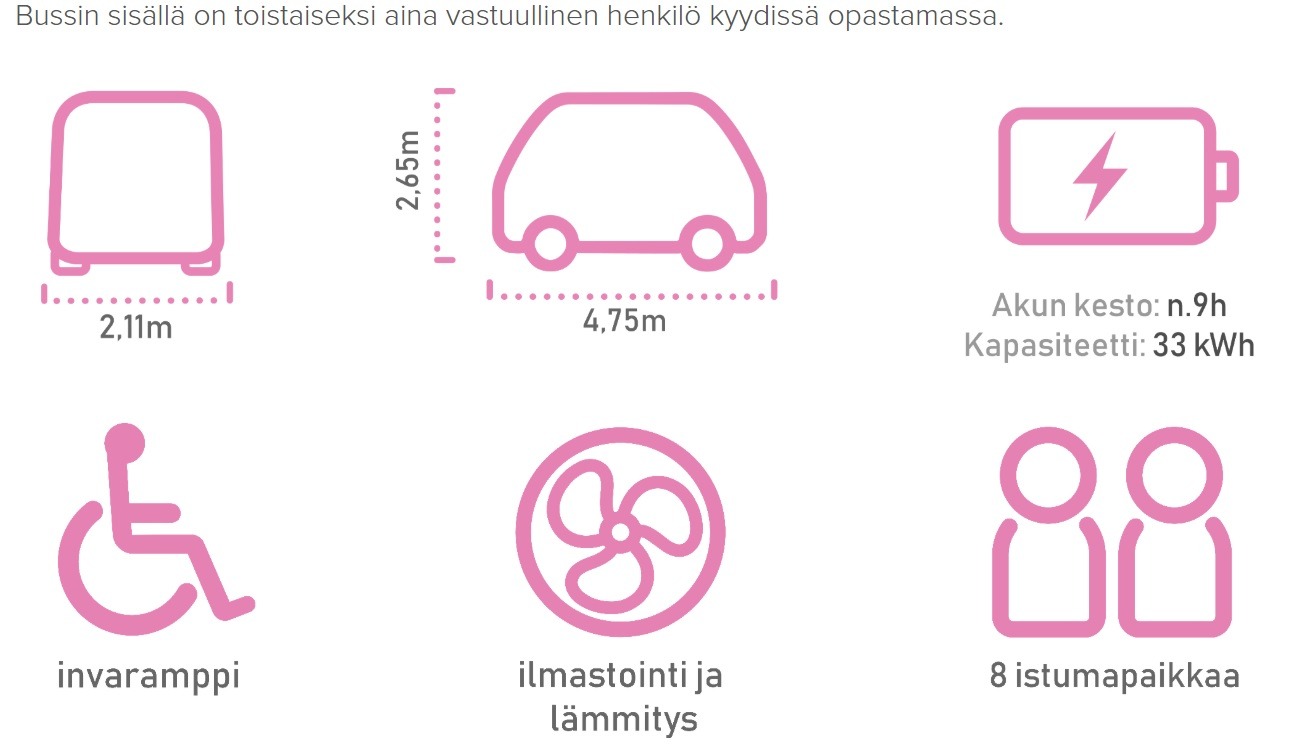
Avainsana: Robottibussi
Uutiset ovat suodatettua tietoa

Ammattikorkeakoulujen tutkimus-, kehittämis- ja innovaatiohankkeiden piirissä toteutetaan usein käytännönläheisiä kokeiluja. Niiden tarkoituksena on todentaa, miten jokin uusi asia toimii käytännössä. Kyseessä voi olla jokin uusi toimintamalli tai fyysinen tuote, jota halutaan testata aidossa käyttöympäristössä. Testaaminen tuottaa tärkeää tietoa näiden toimintamallien tai tuotteiden kehittäjille ja on siten arvokasta työtä. Hankkeiden työn tuloksille halutaan myös laajempaa näkyvyyttä. Yleensä koetaan myönteiseksi, jos uutismediat kiinnostuvat kokeiluista ja niistä saaduista tuloksista. Vakiintuneiden, toimitettujen uutismedioiden tuottamiin uutisiin suhtaudutaan Suomessa yhä melko luottavaisesti. Media tavoittaa laajemmat yleisöt kuin yksittäisen hankkeen viestintäkanavat. Median kiinnostuksen kääntöpuolena on riski siitä, että hanketyö saa jostain syystä kielteistä julkisuutta. Kyse voi olla vaikkapa väärän tiedon leviämisestä, misinformaatiosta. Media toimii kilpaillussa ympäristössä, jossa kaikki reagoivat nopeasti uutiskynnyksen ylittäviin tapahtumiin. Huomioarvoa mitataan otsikoiden klikkauksien määrissä. Suosituimmat uutiset myös saavat nopeasti laajempaa näkyvyyttä lukijoiden linkkijakoina. Väärän tiedon levittyä, sen korjaaminen on hankalaa. Kaikki tieto ei mahdu uutisiin Hankkeissa toimivien vastuulla on tarjota medialle ja muille yleisölle parasta mahdollista saatavilla olevaa tietoa. Uutismedioissa työskennellään aikapaineen alla. Päivittäisuutiset eivät aina taustoita tapahtumia tai ilmiöitä kovinkaan laajasti. Hanketoimijoiden on hyväksyttävä, että hanke voidaan saada näkyviin mediassa, muttei välttämättä juuri siitä näkökulmasta, kuin olisi toivottu. Kaikki oleelliset näkökulmat ja havainnot eivät tosin mahdu hankkeissakaan toteutetun viestinnän sisältöihin. Hankkeiden omassa uutisoinnissakin tehdään valintoja ja linjauksia: hankkeiden sosiaalisen median päivityksissä, rapoteissa ja tiedotteissa tiivistetään pitkällä aikajänteellä kertynyttä tietosisältöä. tuloksista viestiminen vaatii usein tiedon yleistajuistamista kohdeyleisölle sopivalla tavalla. Selkeä viestintä vaatii kiteyttämisen taitoa, mutta liiallista yksinkertaistamista tulee välttää. Hankkeiden tiedotustyössä on hyvä olla mukana aihealueeseen syventynyt viestijä, joka kykenee taustoittamaan asioita ymmärrettävästi niin journalisteille kuin suurelle yleisölle. Kriisitilanne vaatii nopeaa reagointia Omassa työssäni olen toiminut monien robottibussikokeilujen viestinnästä vastaavana asiantuntijana. Kirjoitin heinäkuussa 2020 Tikissä-blogiin hankkeiden kriisiviestinnän ennakoivasta suunnittelusta. Marraskuussa 2021 kohdattiin päivä, jota kukaan robottibussihankkeissa toimiva ei halua kohdata: peltikolari. Robottibussikolarissa oli kyse turvakuljettajana toimineen ihmisen tekemästä inhimillisestä virheestä manuaaliajossa, kuten Helsingin Sanomat uutisoi. Robotti ei ollut kolariin syyllinen. Kun ensimmäinen versio uutisista ilmestyi verkkolehtiin, korvaamaton vahinko robottibussien maineelle oli lähellä. Juttujen otsikoissa mainittiin vain robottibussin kolaroineen. Täsmentävää tietoa ihmiskuskin roolista vahingon aiheuttajana ei mainittu. Luonnollisesti monet lukijat, mediaan luottaen, ottivat jutun totena. Uutisten lukijakommenteissa irvileuat ilakoivat. Tällaisessa tilanteessa on syytä saattaa toimittajat nopeasti ajan tasalle vahingon syistä ja vaatia oikaisua juttuun. Näin toimittiin nytkin ja saman iltapäivän aikana alkuperäisten uutisjuttujen otsikoita päivitettiin. Tämän jälkeen uutisen suosio hiipuikin. Esimerkissä mainittu kolari olisi todennäköisesti voitu välttää, mikäli ajoneuvo olisi kulkenut automaattiajossa. Robotti olisi tehnyt äkkipysäytyksen havaitessaan törmäysriskin. Tätä näkökulmaa ei oikaistuissa uutisjutuissa tuoda esiin. Eikä oikaistu juttuversio välttämättä tavoita koko yleisöä. Emme voi lopulta mitenkään olla täysin varmoja, kuinka monelle robottibussin kolarointiuutisen lukeneelle on jäänyt vääristynyt mielikuva robottibussien turvallisuudesta. Hankkeiden parissa työskentelevien tehtäväksi jää korjata mahdollisia väärinkäsityksiä ja tuoda esiin tosiasiat vielä kriisitilanteen lauettuakin.
Robottibussikokeilut Helsingissä tuottavat arvokasta tietoa
Helsingissä on viime vuosina kokeiltu robottibussien käytettävyyttä avoimessa ympäristössä muun liikenteen seassa. Pitkäkestoisten testijaksojen aikana tavoite on ollut tutkia pienten, itseajavien sähkökäyttöisten ajoneuvojen hyödyntämistä osana kestävämpiä joukkoliikenneratkaisuja. Robottibussit voisivat toimia täydentävänä julkisen liikenteen palveluna, tarjoten runkolinjoille yhdistäviä lyhyen matkan kyytejä harvemmin liikennöidyiltä alueilta. Kokeiluilla on tarkasteltu, voisivatko robottibussit täydentää nykyistä joukkoliikennettä kaupungissa. Automaattisen julkisen liikenteen on ajateltu tulevaisuudessa tuottavan kustannustehokasta palvelua. Tavoitteena on houkutella yksityisautoilijoita siirtymään joukkoliikenteen käyttäjiksi vahvistamalla matkaketjua erilaisin liikkumisvaihtoehdoin. Robottibussin reitin valinta ja ohjelmointi Erilaisten Helsinkiin toivottujen reittivaihtoehtojen joukossa on ollut ideoita, joita ei ole vielä voitu toteuttaa robottibussiteknologian toimintavarmuuteen vaikuttavien reunaehtojen vuoksi. Ongelmia käytössä olleen robottibussimallin kulkemiseen voivat aiheuttaa reitin varrella: Metsäisyys, vapaasti liikkuvat pensaat ja puut, jotka ajoneuvo tulkitsee esteiksi Vähäiset kiintopisteet, joita ajoneuvo tarvitsee paikantaakseen itsensä sen kulkiessa reitillään Mäkisyys, jyrkkä maasto Turhan vilkkaasti liikennöity risteys Liian kapeat kadut tai liikaa kadunvarteen pysäköityjä autoja Lisäksi on huomioitava, ettei hitaasti etenevällä ajoneuvolla pidä häiritä liikaa muuta liikennettä - etenkään joukkoliikennettä, jonka tarjonta Helsingissä on kattavaa. Robottibussin reitti tehdään ajamalla se robottibussilla läpi, keräten karttadataa bussin omilla LiDAR-tutkilla. Vaihtoehtoisesti reittiä ajetaan henkilöautolla, jolloin tallennetaan kolmiulotteista karttadataa henkilöauton katolle asennetulla Mobile Mapping Systemillä (mobiili kartoitusjärjestelmä) Reitti ohjelmoidaan robottibussin tietokoneelle ajamalla reittiä useasti läpi, ohjelmoiden erikseen muun muassa risteysalueet, suojatiet ja bussipysäkit, nopeutta pikkuhiljaa kasvattaen. Liikennöinti voidaan aloittaa muutama viikko valmistelujen jälkeen. Vauhtierot tukkivat kaistat Itä-Helsingissä, Kivikossa keväältä 2018 alkaen suoritetulla testijaksolla ranskalaisvalmisteinen Navya Autonom Shuttle -robottibussi ajoi noin kahden kilometrin mittaista reittiään maksiminopeudella 18 km/h. Bussia liikennöi Metropolia Ammattikorkeakoulu. Reitti osoittautui haasteelliseksi nykyiselle automaattibussiteknologialle. Erityisen haastavaksi osoittautuivat vauhtierot robottibussin ja muun liikenteen välillä. Robottibussin perässä roikkui usein letka muita tienkäyttäjiä, ja hermostuneena autoilijat tai tiellä kulkevat kuorma-autot tekivät tiukkoja ohituksia vaarallisissakin paikoissa. Ajoneuvojen palatessa robottibussin eteen samalle kaistalle, bussi jarrutti melko voimakkaasti lisäten peräänajon riskiä. Jarrutuksia välttääkseen, ohitustilanteissa robottibussin sisällä oleva turvakuljettaja (operaattori) otti bussin aina manuaalisesti hallintaan, mikä vähensi automaattisessa tilassa ajettua ajomäärää. Näin käytännössä selvisi, ettei Kivikon kaltainen nopeamman aluerajoituksen (50 km/h) reitti sovellu vielä tämän hetken tekniikalle. Reittiopas auttaa löytämään robottibussin luo Ensimmäisenä Suomessa, Kivikon robottibussilinjan reitti- ja aikataulutiedot olivat näkyvissä Helsingin Seudun Liikenteen reittioppaassa. Kuten muillakin linjatunnuksilla, postinumeroalue määritti linjan numeron ja perään annettiin kirjain R eli robotti. Näin syntyi linja 94R . Testijakso sijoittui toukokuun puolivälistä marraskuun puoliväliin, jolloin 94R ajoi arkisin aikataulun mukaisesti. Puolen vuoden aikana robottibussille kertyi: 1564 lähtöä 516 operointituntia 96 operointipäivää 1294 matkustajaa Kokeilujakso tuotti arvokasta tietoa robottibussin soveltuvuudesta joukkoliikenteen täydentäjäksi. Rakennustyömaa reitin varrella, kova sade ja kylmä ilma ajokauden loppua kohden tuottivat häiriöitä robottibussin liikennöintiin. Kokeilu tuotti kuitenkin runsaasti kiinnostusta kansallisesti ja kansainvälisesti. Kokeilemaan tulleet matkustajat olivat iloisia ja innoissaan. Kokeilu oli maksuton ja kaikille avoin. Matkustajilta kerättiin palautetta. Metron läheisyys houkuttaa kokeilemaan Johtopäätöksenä ensimmäinen vuoden kokeilusta vahvistui ajatus, että robottibussi kiinnostaa päivittäisenä liikkumisratkaisuna, jos kulkuvälineen toimintavarmuus paranee sekä reitti ja aikataulut palvelevat yksilön liikkumistarpeita. Keväältä alkaen robottibussi 26R on ajanut testireitillään Kalasatamassa Rolan oy:n liikennöimänä. Vaikka ympäristö on osoittautunut Kivikkoon verrattuna sopivammaksi, Kalastamassakaan ei ole ongelmilta säästytty. Alueen runsaista rakennustöistä johtuen muuttuva liikennöintiympäristö on aiheuttanut ongelmia bussin paikantamisen osalta, jolloin se ei ole tietyissä kohdissa pysynyt täysin ajolinjallaan. Kadunvarteen pysäköidyt autot tuottavat ajoittain pulmia niiden ollessa pysäköitynä hieman sallitun alueen ulkopuolelle, tai välillä sallitun alueen sisäpuolellakin. Operaattorin on tällöin puututtava ajoon ja ohitettava pysäköidyt autot tai muut esteet manuaalisesti. Kalasataman kokeilu on saavuttanut suurta suosiota, sillä reitti metron läheisyydessä on helposti Helsingin keskustasta saavutettavissa. Paikalliset ja kauempaa tulleet matkustajat ovat ottaneet robottibussikokeilun omakseen. Alueen iäkkäämmät asukkaat ovat kiitelleet robottibussia kauppareissujensa keventymisestä. Robottibussikokeilu linjatunnuksella 26R jatkuu marraskuun 22. päivään saakka, mikäli säät sallivat. Kokeilut on toteutettu osana mySMARTLife-hanketta, robottibussin pilotoinnit on suoritettu Helsinki RobobusLine -projektissa. Kirjoittaja on hankkeiden projektipäällikkö Metropoliassa. Kirjoittaja Eetu Rutanen toimii projektipäällikkönä Metropolia Ammattikorkeakoulun Älykkään liikkumisen innovaatiokeskittymässä. Robottibussihankkeiden parissa hän on työskennellyt vuodesta 2016, jolloin tehtiin Suomen ensimmäiset tieliikennekokeilut robottibusseilla osana SOHJOA-hanketta. Koulutukseltaan hän on auto- ja kuljetustekniikan insinööri (AMK). Vapaa-aikanaan Eetu pelaa koripalloa ja käy boulderoimassa. Erinäiset TV-sarjat ja elokuvat vievät myös ison osan ajasta.
Robottibussi tarvitsee toimivan reitin

Robottibusseja eli itsestään ajavia pikkubusseja on tutkittu vaihtoehtona joukkoliikenteen syöttämiseksi runkolinjojen solmukohdissa. Robottibussit voisivat olla ratkaisu joukkoliikenteen palvelutason ja kattavuuden parantamiseksi. Suurin tarve on alueilla, joilla joukkoliikenne on ollut perinteisin menetelmin hankalaa tai kallista toteuttaa. Robottibussien nykyinen teknologia ei kuitenkaan ole tavoitteeseen nähden riittävän kehittynyttä. Kulkunopeus ja muun liikenteen huomioimiskyky eivät riitä muun liikenteen seassa liikkumiseen. Robottibusseja varten pitäisi muuttaa liikennejärjestelyjä muuta liikennettä haittaavalla tavalla. Helsingissä syöttöliikenne runkolinjojen liikennevälineisiin on jo melko hyvin täytetty muilla kulkuvälineillä. Tämä vaikeuttaa robottibussien laajaa käyttöönottoa tulevaisuudessa. Jotta suuria muutoksia nykyisiin järjestelyihin kannattaisi tehdä, pitäisi robottibussin tarjota helpompi, edullisempi ja ympäristöystävällisempi tapa liikkua. Julkisten liikennevälineiden käyttökustannuksista noin puolet koostuu palkkakuluista. Siksi palvelua ei voida tarjota joka reitille kellon ympäri. Tästä näkökulmasta julkisen liikenteen palvelutasoa ja kattavuutta on mahdollista parantaa itseajavilla liikennevälineillä. Robottibussien käytettävyyden tutkimista kannattaa siis myös tulevaisuudessa jatkaa. Kokemuksia robottibussien kokeiluista Robottibusseja testattiin ensimmäisen kerran Suomen tieliikenteessä muiden ajoneuvojen seassa Metropolia Ammattikorkeakoulun koordinoimassa SOHJOA-hankkeessa. Kun kyseessä oli ensimmäinen kerta, kun robottibussi kulki muun ajoneuvoliikenteen seassa, ei ympäristöltä tai reitiltä oltu vaatimassa mitään mullistavaa. Kokeilut lähtivät liikkeelle kesällä 2016 Hernesaaresta. Ranskalaisvalmisteinen Easymile EZ10 -robottibussi kulki suoraa tienpätkää Löylyltä Hernesaarenrannan kesäpäivänviettoalueelle. Reitti ei varsinaisesti vastannut todettuun liikkumistarpeeseen, mutta tarjosi otollisen aitiopaikan älyliikenteen demoamiseen. Loppuvuodesta 2016 robottibussi suuntasi Espoon Otaniemeen ja Tampereen Teknillisen Yliopiston kampusalueelle Hervantaan. Otaniemessä bussin oli tarkoitus päästä kulkemaan lähelle valmistuvaa Otaniemen metroasemaa aikomuksena kokeilla varsinaista syöttöliikennettä. Kuinka ollakaan, Länsimetron rakentaminen viivästyi eikä metroasema vielä tuohon aikaan ollut toiminnassa. Otaniemeen palattiin pilottimielessä samalle reitille taas syksyllä 2017, jolloin metroasema oli toiminnassa. Aikaisemmin oli kuitenkin todettu, että metroaseman lähelle pääseminen oli teknisesti haastavaa ja olisi edellyttänyt huomattavia, muuta liikennettä liikaa haittaavia järjestelyjä. Todellista syöttöliikennettä robottibussin hoitamana ei siis päästy kokeilemaan. Tampereen Teknillisen Yliopiston kampusalueella robottibussia testattiin reitillä, joka kulki osittain huoltotiellä sekä osittain jalankulkijoiden ja pyöräilijöiden seassa. Tässä kokeilussa saatiin arvokasta tietoa siitä, miten robottibussi toimisi tällaisessa ympäristössä. Hervannassa todettiin, että operointinopeuden (noin 12 km/h) osalta robottibussi sopisi tällä hetkellä hyvin kulkemaan jalankulkijoiden ja pyöräilijöiden sekaan. Usein ei kuitenkaan ole järkevää rajoittaa jalankulkijoiden ja pyöräilijöiden oikeuksia kulkea heille suunnitelluilla väylillä. Lisäksi, tällaisissa paikoissa olisi väylän kapeuden takia hankala liikennöidä useammalla kuin yhdellä bussilla, joten voitaisiinko silloin täyttää kunnolla liikkumistarve harvalla vuorovälillä (reitin pituudesta riippuen). Kun soppaan lisätään vielä kaupunkien liikkumisstrategiat mikä esimerkiksi Helsingin kohdalla on kävelyn ja pyöräilyn suosiminen ennen joukkoliikennettä ja varsinkin yksityisautoilua, voidaan kai todeta, ettei robottibussin käyttöä kevyen liikenteen väylillä voi suositella, vaikkakin tämä saattaisi jossain tapauksissa luoda uusia mahdollisuuksia matkaketjuihin sekä reitteihin. Parempi paikka robottibussille on siis tieliikenne, jossa se liikkuu muiden ajoneuvojen seassa. Reittisuunnittelun haasteita Robottibussien reittisuunnittelun suhteen on toistaiseksi täytynyt tasapainoilla muun muassa bussin teknisen kyvykkyyden, soveltuvien ympäristöjen, tavoitettavuuden ja sen suhteen, että reitissä olisi jotain järkeä - saataisiin vastattua jollain tasolla todettuun liikkumistarpeeseen. HSL on tunnistanut reittejä Helsingissä, joissa voisi olla kysyntää robottibusseille. Nämä ovat kuitenkin olleet reittejä, joita ei SOHJOA-hankkeessa käytetyllä EZ10-robottibussilla eikä muillakaan tällä hetkellä julkisesti markkinoilla olevilla automaattibusseilla voi toteuttaa. Robottibussien tekniset ominaisuudet eivät ole sillä tasolla, mitä tieliikenteessä ja muiden ajoneuvojen seassa järkevästi liikkumiseen vaadittaisiin, jonka lisäksi niissä on oltava vielä vastuullinen matkustaja, operaattori, fyysisesti kyydissä (teknisistä rajoitteista johtuen). Tieliikennekokeiluja ajatellen nykytekniikalla toteutetuille robottibusseille on todella vaikea löytää sopivia reittejä, jossa ne kulkevat muun ajoneuvoliikenteen seassa. Ideaalisin operointialue SOHJOA-hankkeessa käytetyille robottibusseille olisikin suljettu alue kuten lentokenttä, teollisuusalue, kampusalue tai erilaiset tapahtumat, jossa bussilla korvattaisiin normaalisti kävellen tehtäviä matkoja ilman merkittävää integroimista matkaketjuihin. Tieliikenteessä bussilla ei ole tällä hetkellä edellytyksiä operoida järkevästi - riittävällä nopeudella ja kunnolla tarpeeseen vastaavalla tavalla. Rauhalliset taajama-alueet, joissa nopeusrajoitus on maksimissaan 40 km/h ja joissa kulkee tavanomaisia joukkoliikenteen busseja on todettu olevan osittain hyvin robottibussille sopivia ympäristöjä. Näillä alueilla kadunvarsipysäköinti on usein kielletty tai tiet ovat muuten leveitä, jotta linja-autot mahtuvat esteettömästi ajamaan reitillä ainakin yhteen suuntaan - tämä on edellytys myös robottibussien osalta. Tällaisia ympäristöjä on esimerkiksi Itä-Helsingissä Aurinkolahdessa, Kivikossa ja Herttoniemenrannassa. Näillä busseille suunnitelluilla väylillä tosin tietenkin kulkee jo busseja, joten liikkumistarve on tältä osin täytetty, varsinkin jos vuorovälit ovat tiheitä. Robottibussin hidas operointinopeus ei tässä tapauksessa tuo mitään lisäarvoa näille reiteille, vaan luultavasti päinvastoin haittaa normaalin linjaliikenteen harjoittamista. Kun syöttöliikenne on tällä hetkellä melko hyvin toteutettu varsinkin Helsingissä, on vaikea löytää reittejä, joissa robottibusseille olisi todellista kysyntää nyt käytettävissä olevalla kalustolla. Voidaan myös todeta, että suurilta osin siellä missä on todellista tarvetta joukkoliikenteelle, on se tarve jo täytetty. Eikö siis robottibusseille ole olemassa järkeviä reittejä tai sijaa liikennejärjestelmässä? Ei ole, tai ainakin niitä on ollut todella vaikea löytää nykyiset bussin ominaisuudet huomioon ottaen. Kehitystyön on jatkuttava Jotta robottibussit voisivat olla osana liikennejärjestelmää, tulisi soveltuvat ympäristöt tunnistaa ja organisoida nykyinen linjaliikenne niin, että se mahdollistaa robottibussien liikennöinnin. Toisaalta alueilla, joissa joukkoliikenne ei toimi hyvin, saattaisi robottibusseille olla jo nyt suurta kysyntää varsinkin liikuntarajoitteisten ja esimerkiksi hitaasti pienten lasten kanssa kävellen liikkuvien perheiden keskuudessa. Liikkumistarpeelle on jo olemassa olevia ratkaisuja.Jotta muutoksia nykyisiin järjestelyihin kannattaisi tehdä, pitäisi robottibussien kyetä sellaiseen, mitä eivät perinteiset liikkumisvälineet voi järkevästi tarjota. On päivänselvää, että julkisen liikenteen kattavuutta ja palvelutasoa voi tulevaisuudessa parantaa, kun yksi henkilö valvoisi usean automaattisesti kulkevan bussin toimintaa. Jotta palvelutaso pysyy korkeana ja bussit voisivat järkevästi liikkua muun liikenteen seassa, olisi tekniikan oltava kehittyneempää, bussien pitäisi muun muassa liikkua nopeammin (vähintään 30 km/h), ja tärkeimpänä asiana, bussin sisällä olevasta operaattorista olisi päästävä eroon. Kehitystyötä ei siis suinkaan pidä jättää tähän, ja Metropolia Ammattikorkeakoulun Älykkäämmän liikkumisen innovaatiokeskittymä jatkaakin edelleen robottibussien tutkimista. Muun muassa Horizon 2020 -kokonaisuutta mySMARTLife tukeva Helsinki RobobusLine -hanke tarjoaa alkukesästä alkaen kaikille avoimen innovaatioalustan - liikenteen seassa liikkuvan robottibussin - SOHJOA-hankkeen jatkoksi. Kirjoittaja Eetu Rutanen valmistui keväällä 2016 Metropolia Ammattikorkeakoulusta Auto- ja kuljetustekniikan insinööriksi. Valmistumisen ohessa tarjoutui paikka projektitöihin Metropoliasta SOHJOA-hankkeeseen. Hankkeessa pääsi seuraamaan läheltä robottibussien ensimmäistä tieliikennekokeilua, ja ymmärrystä robottibussien testauksesta, kyvyistä sekä kytkemisestä osaksi liikennejärjestelmää karttui käytännönläheisesti. Huomaamattaan hän olikin jo loppuvuodesta 2017 Helsinki RobobusLine -hankkeen projektipäällikkö ja vastaa myös tähän linkittyvän mySMARTLife-hankkeen robottibussipilotin toteutuksesta.
Haluaisitko liikkua älykkäämmin?

Käypä googlaamassa sana robottibussi tai käy Metropolian SOHJOA-hankkeen sivuilla, niin saat näkyviin syyn, miksi olemme alkaneet Metropoliassa puhua älykkäämmästä liikkumisesta. Googlen hauista näet kuinka CNN, Iltalehti, Helsingin Sanomat, Aamulehti ja monet muut mediat ovat olleet hyvin kiinnostuneita pienestä automaattisesta robottibussista. Kyseessä on siis ajoneuvo, joka kulkee ilman kuskia ja jota testataan oikean liikenteen seassa. Mutta jotta automaattinen liikkuminen olisi ylipäätään mahdollista, on ymmärrettävä uudella tavalla myös muun muassa matkustajia, kaupunkiympäristöä, turvallisuutta, sekä muuta ympäröivää liikennettä. Liikkuminen tulee nähdä palveluna (mobility as a service), jossa laadukkain, halvin, nopein ja kuluttajalle sopivin yhdistelmä palveluita voittaa. Siksi kyse ei ole vain robottiajoneuvosta, vaan älykkäämmästä liikkumisesta. Älykkäämpi liikkuminen on ilmiö, jonka ympärille Metropolia kokoaa osaajia, kehittäjiä ja toimijoita niin omasta organisaatioista kuin sen ulkopuoleltakin. Ilmiön ympärille syntyvä osaamiskeskittymä on Metropolian tulevaisuuden toimintatapa. Kun tunnistamme yhteiskunnallisesti merkittävän ilmiön, tarpeen tai haasteen, tavoittelemme ratkaisua yhdessä. Älykkäämpi liikkuminen voi tuoda ratkaisun moneen kaupunkiliikenteeseen liittyvään haasteeseen ja tarpeeseen. Juuri Metropolialla on kaikki mahdollisuudet asian kehittelemiseen: aidosti monialainen osaaminen, opettajien asiantuntijuus ja tulevaisuuden osaajat, opiskelijamme. Emme tee tätä yksin ilman kattavia verkostoja, yrityksiä ja kaupunkien tukea. Tekesin tiedote Avoin Innovaatio 2.0 vaalii ekosysteemiajattelua saa ajattelemaan miten organisaation on katsottava omien rajojensa ulkopuolelle uusia ideoita etsiessään. Avoimeen innovaatioon kytkeytyvä yhdessä kehittäminen tarjoaa organisaatioille mahdollisuuden kehittää tuotteita ja palveluita, joita ei pelkästään omien resurssein voimalla olisi voitu toteuttaa. Menestyksen nähdäänkin syntyvän yhä enemmän ekosysteemin vahvuudesta. Juuri tämä ekosysteemiajattelu ja sen löytäminen on innoittanut Metropolian kehittämään omia osaamiskeskittymiä. Olemme vahvoja yhdessä, kun puhallamme yhteen hiileen. Kävin haastattelemassa Metropolian mediatekniikan lehtoria Olli Almia tätä blogia varten. Halusin etsiä älykkäämmän liikkumisen asiantuntijan näkökulmaa aiheeseen ja tietää miten hän näkee työskentelyn osana suurempaa kontekstia. Olli opettaa ohjelmointia ja ohjelmistotuotantoa ja työskentelee säännöllisesti erilaisissa hankkeissa. Hän ohjaa mediatekniikan opiskelijaryhmää, joka projektiopinnoissaan työstää mekanismeja robottibussin etävalvontaa. Jos vastuullisen kuskin rooli ajoneuvoista häviää, tulisi etävalvonnalla pystyä tarkkailemaan mitä tapahtuu. Matkustajien tulee olla aina turvassa ja kaiken tulee toimia luotettavasti. Niinpä ohjelmoinnissa pitää tietää mitä tietoja autosta tulee kerätä ja saada tarkempaan käsittelyyn. Älykkäämmässä liikkumisessa Ollia innostavat monet seikat. Iso muutos on digitalisaatio, jonka vaikutuksesta robottiautotkin yleistyvät maailmalla. Hallitus puhuu Liikennekaaresta, jossa tavoitteena on edistää uusien palvelumallien syntymistä ja näin vastata entistä paremmin käyttäjien tarpeisiin. Myös tavaroiden logistiikka voi mennä uusiksi. Ehkäpä räntäsateessa kauppatarvikkeet tulevatkin kotiovelle tai kaupasta ei tarvitse kauppakassia kantaa itse. Liikenneturvallisuus paranee, liikenne tulee sujuvammaksi. Laatu paranee. Kaikesta tästä on hyvä jatkaa älykkäämmän liikkumisen kehittelyä. Yhdessä.
Tikissä on Metropolian tutkimus-, kehittämis- ja innovaatiotoiminnan (TKI) blogi. Bloggaajat ovat ammattikorkeakoulun henkilöstöä sekä muita TKI-toiminnan asiantuntijoita. Jos haluat kirjoittaa blogiin, ota yhteyttä toimituskuntaan.
Milla Åman Kyyrö, päätoimittaja
Viestinnän asiantuntija, TKI-hankkeet ja kehittäminen
p. 050 342 0341
milla.amankyyro@metropolia.fi
Päivi Keränen
Projektipäällikkö, Muotoilu
p. 040 184 1952
paivi.keranen@metropolia.fi
Jussi Linkola
Projektisuunnittelija, Hankeviestintä- ja julkaisupalvelut
p. 040 184 2448
jussi.linkola@metropolia.fi
Toimituskunta toimittaa Tikissä-blogin sisällöt ennen julkaisua.













3AMK ammattikorkeakoulu asiantuntija Dallaten FUTU hanke hankeviestintä hankkeet hyvinvointi innovaatio innovaatio-opinnot innovaatiot Innovation johtaminen Katse tulevaisuuteen kehittäminen keksintö kestävä kehitys koulutus metropolia minno nuoret Oona-hanke opiskelijat oppiminen osaaminen osaamisen kehittäminen resilienssi service design sosiaali- ja terveysala tekoäly tki TKI-toiminta tulevaisuus tuottavuus tutkimus työelämä työhyvinvointi työllistyminen viestintä vuorovaikutus yhteiskehittäminen yrittäjyys yritystoiminta yritysyhteistyö

Ideoimme, rikastamme ja kehitämme käytäntöön uusia ratkaisuja yhteistyössä yritysten, julkisen sektorin, järjestöjen ja asukkaiden kanssa.