
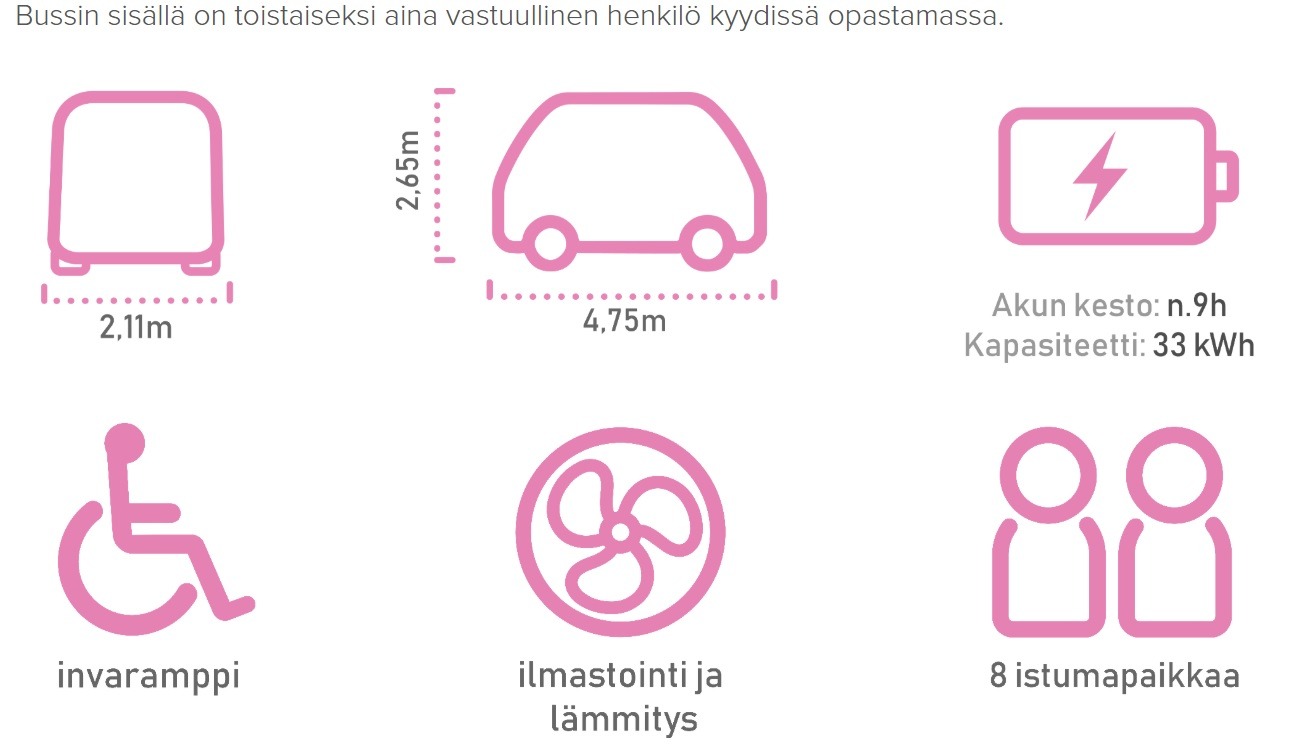
Helsingissä on viime vuosina kokeiltu robottibussien käytettävyyttä avoimessa ympäristössä muun liikenteen seassa. Pitkäkestoisten testijaksojen aikana tavoite on ollut tutkia pienten, itseajavien sähkökäyttöisten ajoneuvojen hyödyntämistä osana kestävämpiä joukkoliikenneratkaisuja.
Robottibussit voisivat toimia täydentävänä julkisen liikenteen palveluna, tarjoten runkolinjoille yhdistäviä lyhyen matkan kyytejä harvemmin liikennöidyiltä alueilta. Kokeiluilla on tarkasteltu, voisivatko robottibussit täydentää nykyistä joukkoliikennettä kaupungissa.
Automaattisen julkisen liikenteen on ajateltu tulevaisuudessa tuottavan kustannustehokasta palvelua. Tavoitteena on houkutella yksityisautoilijoita siirtymään joukkoliikenteen käyttäjiksi vahvistamalla matkaketjua erilaisin liikkumisvaihtoehdoin.
Robottibussin reitin valinta ja ohjelmointi
Erilaisten Helsinkiin toivottujen reittivaihtoehtojen joukossa on ollut ideoita, joita ei ole vielä voitu toteuttaa robottibussiteknologian toimintavarmuuteen vaikuttavien reunaehtojen vuoksi.
Ongelmia käytössä olleen robottibussimallin kulkemiseen voivat aiheuttaa reitin varrella:
- Metsäisyys, vapaasti liikkuvat pensaat ja puut, jotka ajoneuvo tulkitsee esteiksi
- Vähäiset kiintopisteet, joita ajoneuvo tarvitsee paikantaakseen itsensä sen kulkiessa reitillään
- Mäkisyys, jyrkkä maasto
- Turhan vilkkaasti liikennöity risteys
- Liian kapeat kadut tai liikaa kadunvarteen pysäköityjä autoja
Lisäksi on huomioitava, ettei hitaasti etenevällä ajoneuvolla pidä häiritä liikaa muuta liikennettä – etenkään joukkoliikennettä, jonka tarjonta Helsingissä on kattavaa.
Robottibussin reitti tehdään ajamalla se robottibussilla läpi, keräten karttadataa bussin omilla LiDAR-tutkilla. Vaihtoehtoisesti reittiä ajetaan henkilöautolla, jolloin tallennetaan kolmiulotteista karttadataa henkilöauton katolle asennetulla Mobile Mapping Systemillä (mobiili kartoitusjärjestelmä)
Reitti ohjelmoidaan robottibussin tietokoneelle ajamalla reittiä useasti läpi, ohjelmoiden erikseen muun muassa risteysalueet, suojatiet ja bussipysäkit, nopeutta pikkuhiljaa kasvattaen.
Liikennöinti voidaan aloittaa muutama viikko valmistelujen jälkeen.
Vauhtierot tukkivat kaistat
Itä-Helsingissä, Kivikossa keväältä 2018 alkaen suoritetulla testijaksolla ranskalaisvalmisteinen Navya Autonom Shuttle -robottibussi ajoi noin kahden kilometrin mittaista reittiään maksiminopeudella 18 km/h. Bussia liikennöi Metropolia Ammattikorkeakoulu.
Reitti osoittautui haasteelliseksi nykyiselle automaattibussiteknologialle. Erityisen haastavaksi osoittautuivat vauhtierot robottibussin ja muun liikenteen välillä. Robottibussin perässä roikkui usein letka muita tienkäyttäjiä, ja hermostuneena autoilijat tai tiellä kulkevat kuorma-autot tekivät tiukkoja ohituksia vaarallisissakin paikoissa.
Ajoneuvojen palatessa robottibussin eteen samalle kaistalle, bussi jarrutti melko voimakkaasti lisäten peräänajon riskiä. Jarrutuksia välttääkseen, ohitustilanteissa robottibussin sisällä oleva turvakuljettaja (operaattori) otti bussin aina manuaalisesti hallintaan, mikä vähensi automaattisessa tilassa ajettua ajomäärää. Näin käytännössä selvisi, ettei Kivikon kaltainen nopeamman aluerajoituksen (50 km/h) reitti sovellu vielä tämän hetken tekniikalle.
Reittiopas auttaa löytämään robottibussin luo
Ensimmäisenä Suomessa, Kivikon robottibussilinjan reitti- ja aikataulutiedot olivat näkyvissä Helsingin Seudun Liikenteen reittioppaassa. Kuten muillakin linjatunnuksilla, postinumeroalue määritti linjan numeron ja perään annettiin kirjain R eli robotti. Näin syntyi linja 94R .
Testijakso sijoittui toukokuun puolivälistä marraskuun puoliväliin, jolloin 94R ajoi arkisin aikataulun mukaisesti. Puolen vuoden aikana robottibussille kertyi:
- 1564 lähtöä
- 516 operointituntia
- 96 operointipäivää
- 1294 matkustajaa
Kokeilujakso tuotti arvokasta tietoa robottibussin soveltuvuudesta joukkoliikenteen täydentäjäksi. Rakennustyömaa reitin varrella, kova sade ja kylmä ilma ajokauden loppua kohden tuottivat häiriöitä robottibussin liikennöintiin. Kokeilu tuotti kuitenkin runsaasti kiinnostusta kansallisesti ja kansainvälisesti. Kokeilemaan tulleet matkustajat olivat iloisia ja innoissaan. Kokeilu oli maksuton ja kaikille avoin. Matkustajilta kerättiin palautetta.
Metron läheisyys houkuttaa kokeilemaan
Johtopäätöksenä ensimmäinen vuoden kokeilusta vahvistui ajatus, että robottibussi kiinnostaa päivittäisenä liikkumisratkaisuna, jos kulkuvälineen toimintavarmuus paranee sekä reitti ja aikataulut palvelevat yksilön liikkumistarpeita.
Keväältä alkaen robottibussi 26R on ajanut testireitillään Kalasatamassa Rolan oy:n liikennöimänä. Vaikka ympäristö on osoittautunut Kivikkoon verrattuna sopivammaksi, Kalastamassakaan ei ole ongelmilta säästytty. Alueen runsaista rakennustöistä johtuen muuttuva liikennöintiympäristö on aiheuttanut ongelmia bussin paikantamisen osalta, jolloin se ei ole tietyissä kohdissa pysynyt täysin ajolinjallaan. Kadunvarteen pysäköidyt autot tuottavat ajoittain pulmia niiden ollessa pysäköitynä hieman sallitun alueen ulkopuolelle, tai välillä sallitun alueen sisäpuolellakin. Operaattorin on tällöin puututtava ajoon ja ohitettava pysäköidyt autot tai muut esteet manuaalisesti.
Kalasataman kokeilu on saavuttanut suurta suosiota, sillä reitti metron läheisyydessä on helposti Helsingin keskustasta saavutettavissa. Paikalliset ja kauempaa tulleet matkustajat ovat ottaneet robottibussikokeilun omakseen. Alueen iäkkäämmät asukkaat ovat kiitelleet robottibussia kauppareissujensa keventymisestä.
Robottibussikokeilu linjatunnuksella 26R jatkuu marraskuun 22. päivään saakka, mikäli säät sallivat. Kokeilut on toteutettu osana mySMARTLife-hanketta, robottibussin pilotoinnit on suoritettu Helsinki RobobusLine -projektissa. Kirjoittaja on hankkeiden projektipäällikkö Metropoliassa.
Kirjoittaja
 Eetu Rutanen toimii projektipäällikkönä Metropolia Ammattikorkeakoulun Älykkään liikkumisen innovaatiokeskittymässä. Robottibussihankkeiden parissa hän on työskennellyt vuodesta 2016, jolloin tehtiin Suomen ensimmäiset tieliikennekokeilut robottibusseilla osana SOHJOA-hanketta. Koulutukseltaan hän on auto- ja kuljetustekniikan insinööri (AMK). Vapaa-aikanaan Eetu pelaa koripalloa ja käy boulderoimassa. Erinäiset TV-sarjat ja elokuvat vievät myös ison osan ajasta.
Eetu Rutanen toimii projektipäällikkönä Metropolia Ammattikorkeakoulun Älykkään liikkumisen innovaatiokeskittymässä. Robottibussihankkeiden parissa hän on työskennellyt vuodesta 2016, jolloin tehtiin Suomen ensimmäiset tieliikennekokeilut robottibusseilla osana SOHJOA-hanketta. Koulutukseltaan hän on auto- ja kuljetustekniikan insinööri (AMK). Vapaa-aikanaan Eetu pelaa koripalloa ja käy boulderoimassa. Erinäiset TV-sarjat ja elokuvat vievät myös ison osan ajasta.


















Kommentit
Ei kommentteja