
Avainsana: mySMARTLife
Transport emission reduction goals in the light of energy consumption and charging of robot buses

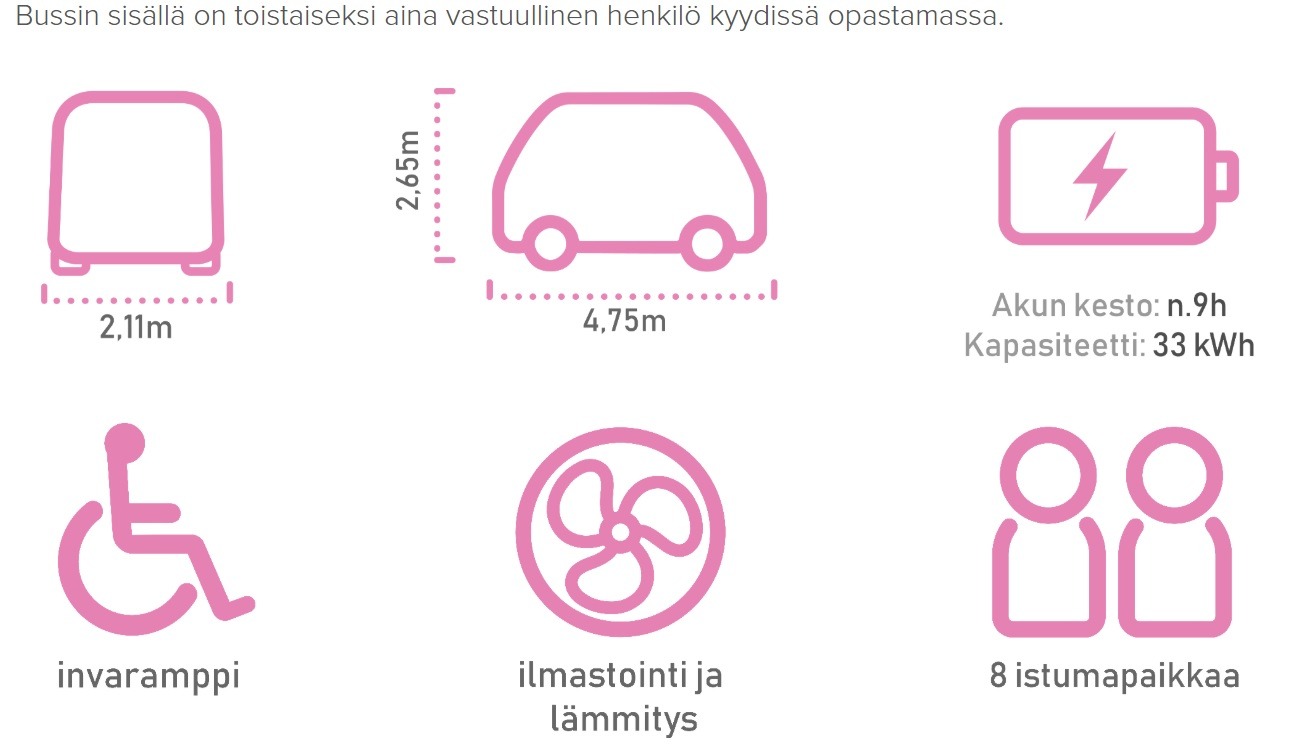
Transport represents almost a quarter of Europe's greenhouse gas emissions [1]. Cities are implementing measures striving to prevent and mitigate climate change and become carbon-neutral. This is also a consequence of EU policy where emission reductions are promoted and change towards sustainable energy sources within public vehicle fleets is fostered. New technological solutions such as electric and autonomous vehicles are developed to help in mobility challenges. The question remains, do they help us to reach our goals? In this blog post, we examine how much energy a robot bus consumes. Emission reduction goals in Finland Finnish Ministry of Transport and Communications [2] has identified three ways of cutting the greenhouse gas emissions of transport in Finland by reducing the performance (kilometres) of emission-generating transport and by improving the energy efficiency of the transport system in other ways. adopting low-emission or emission-free technologies in vehicles (such as electric cars) introducing fuels with even lower emissions or renewable fuels. According to the Analysis of future transport in the City of Helsinki in Helsinki and other urban areas, in particular, the intention is to reduce the number of kilometres driven by cars and replace them with public transport walking cycling various transport services. At the same time, it is attempted to replace vehicles with low- or zero-emission vehicles as quickly as possible. [3.] In relation to these goals, robot buses have been seen to increase the modal share of public transport and lower the use of private cars while also having an electric drivetrain. The first experiences from pilots in Finland One of the challenges for the public transport system is to provide a cost-effective and demand-responsive service in sparsely populated areas with small numbers of public transport users. To solve this problem in the transport system, robot buses have been seen as a complementary mean of transport which does not replace the existing fleet and routes. The robot bus pilots implemented in Finland since 2015 by Metropolia University of Applied Sciences’ Smart Mobility Innovation Hub have been focusing on defining the overall maturity level of the available technology and suitability to Finnish transport system. During the pilots robot buses have been operated on temporary established routes as a complementary first/last mile public transport service. Existing official public transport bus lines have not been possible to replace, as the whole ecosystem is still looking for its final form. How to arrange the daily automated bus operation with as minimal human interaction as possible both on site by the operational route and from a remote control center when piloted buses are still prototypes legislation for operating automated vehicles is not complete it can be difficult to reach out for viable routes within the current highly functional public transport service and coverage level in the capital region. It has been noted that experimental and artificial pilot routes are often attracting mostly people who just try out the bus without using it as part of the travel chain. Instead of trips made by private cars, it can lead to replacing walking. This is emphasized by the nature of pilots where new technology is introduced and advertised to the public, further increasing the number of curious “test passengers”. As conclusion, the potential use cases and benefits of robot buses in the future could be shortly listed as follows: On demand-based automated robot buses should be able to complement the public transport offer and provide a service that specifically meets demand. In areas of higher demand, robot buses could offer so-called last-mile journeys and complement the feeder transport. On demand-services could be radically more cost effective to implement as a driverless service where one person could concurrently monitor the operation of several vehicles. Considering these use cases, for large scale uptake of the technology, it should be especially focused on what kind of requirements the buses should meet and what is a viable price level for passenger km to compete against conventional means of transport. For instance on last mile routes and especially in case of feeder traffic routes the speed limit can easily rise up to 50 km/h at some parts. The maximum achieved speed in past pilots on open roads has been below 30 km/h. Being not able to operate the whole route will increase the need for transfers from one mean of transport to another. This lowers the attractiveness of the service and simultaneously emphasizes the functionality of the entire travel chain. On the other hand the still required presence of an onboard safety driver (operator) does not offer enhancements to economical viability. Further experiments in relation to energy consumption are necessary In relation to sustainability, more experiments are needed from different operational conditions and routes to see the average energy consumption of robot bus operation on a large scale and develop the solutions towards desired numbers. At this stage it can be said that the autonomy or self-driving features of a robot bus do not provide any specific notable means to lower the consumption compared to human driven electric vehicles. Therefore, robot buses can be compared generally to vehicles of the same size when investigating the energy consumption and efficiency. In mySMARTLife project a robot bus was operated in two separate pilot periods in Helsinki in 2018 and 2019 with following attributes: a mass (empty weight) of 2400 kg capacity of 15 persons operating on weekdays around 6 hours per day with 20 minutes intervals operating 18-35 km per day. After operating hours, the bus’s 33 kWh 80 V drivetrain battery was always charged in a specific temporary storage location. The energy consumption of the robot bus measured from the charging energy was averagely 0,79 kWh/km and 1,09 kWh/km. In comparison, the conventional electric bus in Finland has a mass, depending on the model, of 9500-12500 kg capacity of 70-80 persons Such electric buses consume around 1 kWh/km in average optimal conditions, but the consumption may increase to 1.5 kWh/km in cold, snowy and slippery conditions. [4.] Thus in the operational conditions of the pilots, the robot bus was consuming almost the same amount of energy than a bus with 5 times greater passenger capacity. As a result of the pilots it could be noted that, in addition to the drivetrain of the robot bus, weather, and consequently the use of air conditioning or heating were significant consumers of energy. Otherwise the potential operating time and range was affected among other things by: topography on the route schedule of the operation (how long the bus is staying idle on bus stops between the departures) different electrical components such as sensors, computers and screens in the bus. The results are worrying as still a large amount of energy needs in Europe are met by fossil fuels such as oil, gas and coal. It should also be noted that some electric buses as well as electric robot buses can use additional means, such as fuel powered auxiliary heater to heat the passengers’ cabin. However, for instance production of near CO2 neutral renewable diesel has made good progress in Finland which is improving the sustainability of fuel usage. An electric vehicle is not automatically sustainable, a lot is dependent on what kind of conditions the vehicle is operated in, how the used electricity is produced and how the vehicle is manufactured. The overall efficiency of a robot bus operation could be enhanced to some extent for instance: with a route and service that specifically meets the demand by reducing the off duty hours increasing the number of departures (provided that there is a demand for such a densely operated service) by exploring ways for shutting down or putting the bus’s components to sleep mode at the times when the bus would stay idle on bus stops/terminus by decreasing energy loss during charging by reducing the amount of data handling of the vehicle and fleet control hardware. Issues with storage and charging Implementation of robot buses and complete uptake of the solutions face challenges as motivation to shift towards new technology and the availability of desired technology do not always complement each other. The most potential large scale assigner of robot buses would be the local public transport authorities or cities in general, but public sector innovation promotion is based on the mitigated risk strategies, which promotes safe and planned outcomes instead of risky dynamic test and fail approach. Robot buses have not yet proved to be a viable complementary solution as part of public transport which is why large scale investments and permanent decisions are pending. Due to lack of large scale investments and long-term decisions on uptake of the technology, it has been forced to act according to temporary environments and conditions. In practice this can be seen especially in case of depots and charging possibilities. Robot buses have been stored and charged either outside completely uncovered, in tents or even in service tunnels. Charging has been conducted outside of operational hours while also limiting the possible service hours during the day. Costs of equipping the depots with necessary tools and machines for maintenance work can rise disproportionately high compared to the pilot’s duration. Finding a proper area or depot for one vehicle has proven to be a difficult task, not to mention a situation where it is necessary to store several units: Due to the features that does not allow driving at high speeds, e.g. lack of proper driving equipment such as steering wheel and pedals, already existing depots of public transport operators cannot be used as they are often located too far away from the route where the robot bus is operated. Parking garages are often too low for storing a robot bus with the height of around 3 meters. Electricity for charging is not available directly in every place. Space for a temporary (or long-term basis) established depots can be limited especially in a densely built environment. Costs of heated and well-equipped temporary storage place may rise significantly high, especially if several vehicles should be fitted there. The actual driving from the operational routes to the depots has been carried out manually by the onboard operator in the bus. Charging cable has been plugged in to the bus by the operator as well. Depending on the operating conditions on a route, high power charging pantograph solutions – similar to what are used in case of full size electric buses to charge the buses at end stations from the roof of the bus – could be studied also in case of robot buses. Another option is already introduced, inductive charging, but the charging speeds have been slow. On the programmed route, a robot bus operates automatically within a few centimetres accuracy, which capability would ease the positioning of the shuttle beneath a charging pantograph or on an inductive charging pad. These options would potentially allow more automated solutions for charging during and after the operating hours without human intervention and battery capacity of the vehicles could be reduced. References Transport emissions. European Commission. (opens ec.europa.eu) Ilmastonmuutos. Väylävirasto. (in Finnish, opens vayla.fi) Putkonen, Reetta et al. 2020. Analysis of future transport in the City of Helsinki, (PDF) Lehtinen, Annakaisa & Kanerva, Olli. 2017. Selvitys sähköbussien edistämiseksi suomalaisilla kaupunkiseuduilla. Liikennevirasto. (in Finnish, PDF). Author Eetu Rutanen is automotive and transport engineer who works as project manager at Metropolia University of Applied Sciences' Smart Mobility Innovation Hub.
Robottibussikokeilut Helsingissä tuottavat arvokasta tietoa
Helsingissä on viime vuosina kokeiltu robottibussien käytettävyyttä avoimessa ympäristössä muun liikenteen seassa. Pitkäkestoisten testijaksojen aikana tavoite on ollut tutkia pienten, itseajavien sähkökäyttöisten ajoneuvojen hyödyntämistä osana kestävämpiä joukkoliikenneratkaisuja. Robottibussit voisivat toimia täydentävänä julkisen liikenteen palveluna, tarjoten runkolinjoille yhdistäviä lyhyen matkan kyytejä harvemmin liikennöidyiltä alueilta. Kokeiluilla on tarkasteltu, voisivatko robottibussit täydentää nykyistä joukkoliikennettä kaupungissa. Automaattisen julkisen liikenteen on ajateltu tulevaisuudessa tuottavan kustannustehokasta palvelua. Tavoitteena on houkutella yksityisautoilijoita siirtymään joukkoliikenteen käyttäjiksi vahvistamalla matkaketjua erilaisin liikkumisvaihtoehdoin. Robottibussin reitin valinta ja ohjelmointi Erilaisten Helsinkiin toivottujen reittivaihtoehtojen joukossa on ollut ideoita, joita ei ole vielä voitu toteuttaa robottibussiteknologian toimintavarmuuteen vaikuttavien reunaehtojen vuoksi. Ongelmia käytössä olleen robottibussimallin kulkemiseen voivat aiheuttaa reitin varrella: Metsäisyys, vapaasti liikkuvat pensaat ja puut, jotka ajoneuvo tulkitsee esteiksi Vähäiset kiintopisteet, joita ajoneuvo tarvitsee paikantaakseen itsensä sen kulkiessa reitillään Mäkisyys, jyrkkä maasto Turhan vilkkaasti liikennöity risteys Liian kapeat kadut tai liikaa kadunvarteen pysäköityjä autoja Lisäksi on huomioitava, ettei hitaasti etenevällä ajoneuvolla pidä häiritä liikaa muuta liikennettä - etenkään joukkoliikennettä, jonka tarjonta Helsingissä on kattavaa. Robottibussin reitti tehdään ajamalla se robottibussilla läpi, keräten karttadataa bussin omilla LiDAR-tutkilla. Vaihtoehtoisesti reittiä ajetaan henkilöautolla, jolloin tallennetaan kolmiulotteista karttadataa henkilöauton katolle asennetulla Mobile Mapping Systemillä (mobiili kartoitusjärjestelmä) Reitti ohjelmoidaan robottibussin tietokoneelle ajamalla reittiä useasti läpi, ohjelmoiden erikseen muun muassa risteysalueet, suojatiet ja bussipysäkit, nopeutta pikkuhiljaa kasvattaen. Liikennöinti voidaan aloittaa muutama viikko valmistelujen jälkeen. Vauhtierot tukkivat kaistat Itä-Helsingissä, Kivikossa keväältä 2018 alkaen suoritetulla testijaksolla ranskalaisvalmisteinen Navya Autonom Shuttle -robottibussi ajoi noin kahden kilometrin mittaista reittiään maksiminopeudella 18 km/h. Bussia liikennöi Metropolia Ammattikorkeakoulu. Reitti osoittautui haasteelliseksi nykyiselle automaattibussiteknologialle. Erityisen haastavaksi osoittautuivat vauhtierot robottibussin ja muun liikenteen välillä. Robottibussin perässä roikkui usein letka muita tienkäyttäjiä, ja hermostuneena autoilijat tai tiellä kulkevat kuorma-autot tekivät tiukkoja ohituksia vaarallisissakin paikoissa. Ajoneuvojen palatessa robottibussin eteen samalle kaistalle, bussi jarrutti melko voimakkaasti lisäten peräänajon riskiä. Jarrutuksia välttääkseen, ohitustilanteissa robottibussin sisällä oleva turvakuljettaja (operaattori) otti bussin aina manuaalisesti hallintaan, mikä vähensi automaattisessa tilassa ajettua ajomäärää. Näin käytännössä selvisi, ettei Kivikon kaltainen nopeamman aluerajoituksen (50 km/h) reitti sovellu vielä tämän hetken tekniikalle. Reittiopas auttaa löytämään robottibussin luo Ensimmäisenä Suomessa, Kivikon robottibussilinjan reitti- ja aikataulutiedot olivat näkyvissä Helsingin Seudun Liikenteen reittioppaassa. Kuten muillakin linjatunnuksilla, postinumeroalue määritti linjan numeron ja perään annettiin kirjain R eli robotti. Näin syntyi linja 94R . Testijakso sijoittui toukokuun puolivälistä marraskuun puoliväliin, jolloin 94R ajoi arkisin aikataulun mukaisesti. Puolen vuoden aikana robottibussille kertyi: 1564 lähtöä 516 operointituntia 96 operointipäivää 1294 matkustajaa Kokeilujakso tuotti arvokasta tietoa robottibussin soveltuvuudesta joukkoliikenteen täydentäjäksi. Rakennustyömaa reitin varrella, kova sade ja kylmä ilma ajokauden loppua kohden tuottivat häiriöitä robottibussin liikennöintiin. Kokeilu tuotti kuitenkin runsaasti kiinnostusta kansallisesti ja kansainvälisesti. Kokeilemaan tulleet matkustajat olivat iloisia ja innoissaan. Kokeilu oli maksuton ja kaikille avoin. Matkustajilta kerättiin palautetta. Metron läheisyys houkuttaa kokeilemaan Johtopäätöksenä ensimmäinen vuoden kokeilusta vahvistui ajatus, että robottibussi kiinnostaa päivittäisenä liikkumisratkaisuna, jos kulkuvälineen toimintavarmuus paranee sekä reitti ja aikataulut palvelevat yksilön liikkumistarpeita. Keväältä alkaen robottibussi 26R on ajanut testireitillään Kalasatamassa Rolan oy:n liikennöimänä. Vaikka ympäristö on osoittautunut Kivikkoon verrattuna sopivammaksi, Kalastamassakaan ei ole ongelmilta säästytty. Alueen runsaista rakennustöistä johtuen muuttuva liikennöintiympäristö on aiheuttanut ongelmia bussin paikantamisen osalta, jolloin se ei ole tietyissä kohdissa pysynyt täysin ajolinjallaan. Kadunvarteen pysäköidyt autot tuottavat ajoittain pulmia niiden ollessa pysäköitynä hieman sallitun alueen ulkopuolelle, tai välillä sallitun alueen sisäpuolellakin. Operaattorin on tällöin puututtava ajoon ja ohitettava pysäköidyt autot tai muut esteet manuaalisesti. Kalasataman kokeilu on saavuttanut suurta suosiota, sillä reitti metron läheisyydessä on helposti Helsingin keskustasta saavutettavissa. Paikalliset ja kauempaa tulleet matkustajat ovat ottaneet robottibussikokeilun omakseen. Alueen iäkkäämmät asukkaat ovat kiitelleet robottibussia kauppareissujensa keventymisestä. Robottibussikokeilu linjatunnuksella 26R jatkuu marraskuun 22. päivään saakka, mikäli säät sallivat. Kokeilut on toteutettu osana mySMARTLife-hanketta, robottibussin pilotoinnit on suoritettu Helsinki RobobusLine -projektissa. Kirjoittaja on hankkeiden projektipäällikkö Metropoliassa. Kirjoittaja Eetu Rutanen toimii projektipäällikkönä Metropolia Ammattikorkeakoulun Älykkään liikkumisen innovaatiokeskittymässä. Robottibussihankkeiden parissa hän on työskennellyt vuodesta 2016, jolloin tehtiin Suomen ensimmäiset tieliikennekokeilut robottibusseilla osana SOHJOA-hanketta. Koulutukseltaan hän on auto- ja kuljetustekniikan insinööri (AMK). Vapaa-aikanaan Eetu pelaa koripalloa ja käy boulderoimassa. Erinäiset TV-sarjat ja elokuvat vievät myös ison osan ajasta.
Tikissä on Metropolian tutkimus-, kehittämis- ja innovaatiotoiminnan (TKI) blogi. Bloggaajat ovat ammattikorkeakoulun henkilöstöä sekä muita TKI-toiminnan asiantuntijoita. Jos haluat kirjoittaa blogiin, ota yhteyttä toimituskuntaan.
Milla Åman Kyyrö, päätoimittaja
Viestinnän asiantuntija, TKI-hankkeet ja kehittäminen
p. 050 342 0341
milla.amankyyro@metropolia.fi
Päivi Keränen
Projektipäällikkö, Muotoilu
p. 040 184 1952
paivi.keranen@metropolia.fi
Jussi Linkola
Projektisuunnittelija, Hankeviestintä- ja julkaisupalvelut
p. 040 184 2448
jussi.linkola@metropolia.fi
Toimituskunta toimittaa Tikissä-blogin sisällöt ennen julkaisua.













3AMK ammattikorkeakoulu asiantuntija Dallaten FUTU hanke hankeviestintä hankkeet hyvinvointi innovaatio innovaatio-opinnot innovaatiot Innovation johtaminen Katse tulevaisuuteen kehittäminen keksintö kestävä kehitys koulutus metropolia minno nuoret Oona-hanke opiskelijat oppiminen osaaminen osaamisen kehittäminen resilienssi service design sosiaali- ja terveysala tekoäly tki TKI-toiminta tulevaisuus tuottavuus tutkimus työelämä työhyvinvointi työllistyminen viestintä vuorovaikutus yhteiskehittäminen yrittäjyys yritystoiminta yritysyhteistyö

Ideoimme, rikastamme ja kehitämme käytäntöön uusia ratkaisuja yhteistyössä yritysten, julkisen sektorin, järjestöjen ja asukkaiden kanssa.